Biomechanics of Sport Sport and Exercise

La biomécanique est une science interdisciplinaire qui étudie les concepts de la mécanique appliqués aux sciences du vivant. Elle évolue à la frontière entre la biologie et la mécanique en s’appropriant les connaissances d’un grand nombre d’autres disciplines scientifiques.
De nombreuses catégories constituent la biomécanique. L’une d’entre elles est la biomécanique du sport et de l’exercice qui a pour but d’étudier principalement le mouvement du corps humain et son interaction avec le milieu dans lequel il évolue. C’est un sujet très complexe. Le corps humain est un système articulé dont les muscles sont les moteurs internes qui permettent le mouvement. Cette structure est dirigée hiérarchiquement par le cerveau et le système nerveux. Voila pourquoi l’utilisation des connaissances et des expériences de différentes disciplines scientifiques est nécessaire à sa totale compréhension.
Les applications de la biomécanique se développent et s’élargissent constamment, car pratiquement toute l’activité humaine est liée à l’interaction mécanique entre le corps et le milieu dans lequel il évolue. Parmi les différentes applications de la biomécanique, il est possible de citer l’étude de la locomotion, la conception de prothèses et d’orthèses, l’amélioration de la performance sportive, la conception d’équipements sportifs, l’étude du vivant dans des interactions mécaniques complexes comme dans des milieux aériens, aquatiques, en apesanteur, les études d’interaction homme-machine, ainsi que la robotique, etc.
A travers différents chapitres, le cours de Biomécanique du Sport et de l’exercice s’attachera à vous expliquer les bases fondamentales qu’il est nécessaire de maîtriser pour mieux appréhender ensuite les performances du corps humain lors du mouvement et d’exercices. N’hésitez pas à consulter le site régulièrement, le cours sera mis à jour, chapitre après chapitre.
I. Histoire et développement de la biomécanique
A. L’Antiquité
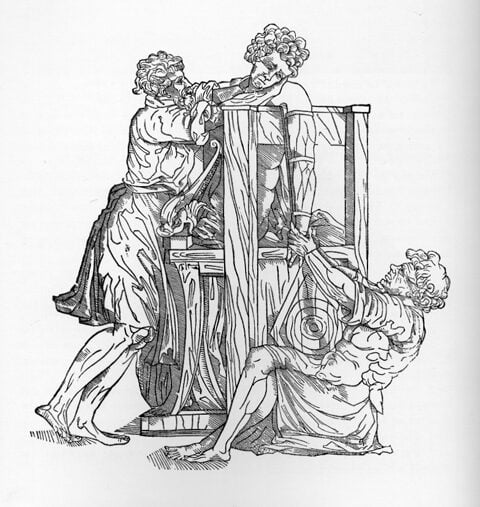
Le développement de la biomécanique est tout d’abord né d’un intérêt scientifique pour le corps humain et son anatomie. Les traces attestant d’un tel intérêt se retrouvent dans des papyrus égyptiens datés de 1700-1600 av. J.-C., comme le papyrus Edwin Smith ou le papyrus Ebers. Ces connaissances devaient certainement être nécessaires aux techniques d’embaumement, néanmoins l’anatomie en était encore à un stade peu avancée. Aux environs du 4ème siècle avant notre ère, Hippocrate (460-377 av. J.-C.) fonde la médecine moderne, néanmoins l’interdiction de la dissection du corps humain limite les connaissances anatomiques et physiologiques. Cependant, Hippocrate se base sur la logique et la réflexion pour soigner les maladies et les blessures articulaires (Fig. 1).
Dans le courant du 2ème siècle, Claude Galien (130-201 ou 216), médecin de l’empereur romain Marc Aurèle, a contourné l’interdiction de dissection du corps humain en étudiant l’anatomie animale, et notamment celle du singe Magot. Ces connaissances anatomiques, souvent erronées, resteront inchangées plus de 1300 ans – jusqu’aux dissections humaines faites par le médecin flamand Andreas Vesalius (1514-1564) qui révolutionnera l’anatomie et l’étude du corps humain.
B. La Renaissance est une des périodes les plus prospères pour la connaissance scientifique
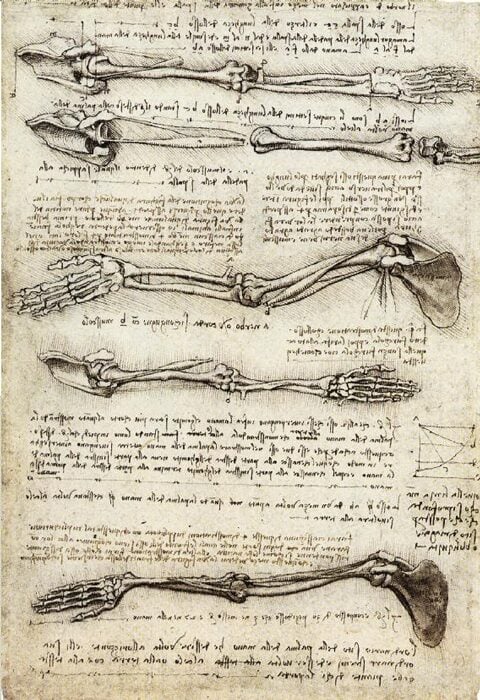
Cependant, c’est Leonard de Vinci (1452-1519) qui fut l’un des premiers à disséquer des êtres humains. Nous lui devons notamment de nombreuses descriptions anatomiques des os, des articulations et des muscles. Dans son essai Codex Atlanticus, Leonard de Vinci réalise les premières descriptions approfondies de la mécanique des mouvements humains dans les différents plans de l’espace (Fig. 2). Il souligne d’ailleurs que “la science de la mécanique est en cela si noble et utile en comparaison à toutes les autres sciences, qu’il se peut que tous les organismes vivants ayant la possibilité de se mouvoir soient régis selon ses lois”.
La mécanique devient une science à part entière grâce à Galilée (1564-1642). En effet, celui-ci s’intéresse très jeune à la mécanique et aux mouvements. Il étudie la médecine et la physique, il confirme plusieurs théorèmes sur le centre de gravité et s’intéresse à la chute des corps et aux pendules. Grâce à ces études, Galilée utilise le pendule pour mesurer le pouls. Des expérimentations et analyses de Galilée sur la mécanique des systèmes vivants existent dans son œuvre écrite en 1638 Discorsi e dimostrazioni matematiche intorno a due nuove scienze attenenti alla meccanica e i movimenti locali.
L’un des premiers essais d’analyse scientifique du mouvement d’organismes vivants (i.e., la locomotion) dans l’espace est de Giovanni Alfonso Borelli (1608–1679). Pour cela, il s’est appuyé sur la théorie de la mécanique de Galilée. Dans son œuvre De motu animalium (1679), il compare la locomotion de l’homme avec le mouvement d’une petite barque et de son rameur et constate les similitudes entre l’appui du pied sur le sol et l’appui de la pelle de la rame dans l’eau. Dans la deuxième partie de son livre, il s’essaie à l’explication des forces internes, c’est-à-dire les contractions musculaires. Borelli a étudié la locomotion sur terre, dans l’eau et dans l’air avec la marche des animaux, la nage des poissons et le vol des oiseaux.
C. Le XIXème siècle et l’analyse scientifique du mouvement
La notion moderne de la locomotion englobe tous les déplacements des organismes vivants dans les milieux réels. Chez l’homme, la marche est une locomotion terrestre très complexe dans laquelle participe pratiquement tout le système locomoteur – environ 200 os, 320 muscles squelettiques et de nombreuses articulations. Les premières recherches expérimentales de la locomotion humaine sont réalisées à Göttingen par les frères Wilhelm and Eduard Weber en 1836. Ils établissent que le centre de masse du corps en position debout se situe à environ 56.7 % de la hauteur du corps, mesuré à partir du sol. Lors de la marche, ils mesurent la longueur et la fréquence des pas à différentes vitesses. Ils constatent que :
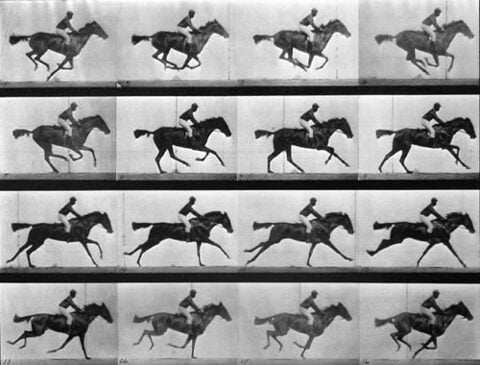
L’intérêt de la recherche sur la locomotion humaine s’accroît lorsqu’Eadweard Muybridge (1830-1904) réalise les premières photographies successives d’un mouvement dans l’espace. A l’époque, une polémique existait quant à savoir si lors d’un galop, les quatre pattes du cheval pouvaient être en l’air simultanément. En 1878, Muybridge dispose 12 appareils photographiques sur une ligne. Un cheval au galop s’élance et déclenche chaque appareil en passant devant lui. Cette première suite de photographies prouve qu’il existe une phase où les 4 pattes du cheval sont en l’air simultanément (Fig. 3).
Intéressé par les travaux de Muybridge, le scientifique français Étienne-Jules Marey (1830-1904) prend contact avec lui en 1881, il veut étudier la mécanique du vol des oiseaux. A cette époque, le pôle d’influence de la recherche scientifique se trouve en France. Le leader est E.J. Marey – Professeur au Collège de France. Dans ce groupe, participent des scientifiques tels que Carlet, Demeny et Pages. Le groupe publie quelques études importantes – Marey (1872), Carlet (1872), Marey (1873, 1874).

Adolf Fick (1860,1866) et Guillaume-Benjamin Duchenne (1867,1873) ont contribué de manière significative à une meilleure compréhension du fonctionnement des systèmes musculaires et articulaires.
A partir de sa rencontre avec Muybridge, Marey crée le fusil photographique en 1882 (Fig. 4). C’est un appareil portatif qui permet de prendre 12 clichés sur une même plaque grâce à un obturateur rotatif. Il permet de décomposer et d’étudier facilement le mouvement. Sur la base du fusil, Marey invente le chronophotographe. C’est un appareil fixe qui fonctionne sur le même principe que le fusil.
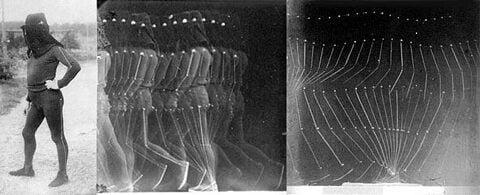
La même année, Marey crée la station physiologique du Parc des Princes, financée par l’état français dans le but de soutenir l’effort de guerre par la recherche scientifique. Dans ce but, il étudie le mouvement humain (i.e., la marche, la course, le saut, etc.) en photographiant de profil les sujets sur un fond noir.
Chaque sujet portait une combinaison noire sur laquelle étaient cousues des bandes blanches pour représenter les segments corporels. Le résultat final obtenu est un kinogramme (Fig. 5). Cette méthode est toujours utilisée même si les appareils numériques remplacent désormais le chronophotographe, et des marqueurs réfléchissants remplacent les bandes blanches.
Christian Wilhelm Braune (1831-1892) et Otto Fischer (1861–1917) s’inspirent fortement des travaux de Marey. Apres la mort de Braune, Fischer améliore la technique d’étude du mouvement de Marey en utilisant quatre appareils chronophotographiques. Lors de l’étude de la marche, les expérimentations et l’analyse des données sont plus précises, et les résultats plus significatifs. Il conclue que pendant la marche, le membre inferieur n’a pas un pur comportement de pendule et que cela dépend des forces musculaires. Ces conclusions contredisent celles des frères Weber.
D. Le XXème siècle : La biomécanique comme science moderne
Fils d’Adolf Fick et étudiant d’Otto Fischer, Rudolf Fick est l’auteur d’un livre d’anatomie publié au début du 20ème siècle intitulé Manuel d’anatomie et mécanique des articulations. Dans les trois parties qui constituent le livre sont détaillés précisément chaque muscle et articulation.
A cette époque, les travaux de Jules Amar (1879-1935) prennent une importance significative en liant les théories du mouvement articulaire à la physiologie humaine pour la rééducation de patients amputés qui nécessitent des prothèses. Pour cela, Amar invente le “trottoir dynamographique” qui permet de mesurer les forces appliquées au sol par les patients, il l’utilise pour adapter les prothèses aux patients. Cet appareil est l’ancêtre de la plateforme de force qu’il est possible de retrouver quasiment dans chaque laboratoire de biomécanique de nos jours. La première guerre mondiale est la cause d’un grand nombre d’amputations des membres inférieurs et supérieurs. De ce fait, l’attention de nombreux chercheurs (e.g., Mommsen (1918), Shede (1918), Bloch (1919), Schmetz (1921), Verth (1927), etc.) s’est portée sur l’étude du mouvement et la réalisation de prothèses.
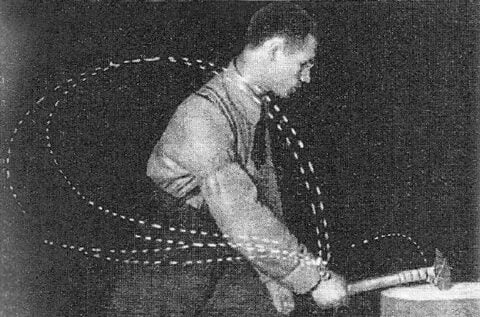
En Russie, le développement de la biomécanique commence avec les travaux du physiologiste Ivan Sechenov (1829-1905) et du physicien et anatomiste Peter Lesgaft (1837-1909). Cependant, c’est Nikolai Bernstein (1896-1966), neurophysiologiste mais ayant suivi une formation en mécanique et mathématique, qui représente la biomécanique russe au niveau internationale. Ce scientifique et ces collaborateurs ont analysé le mouvement humain, notamment pour optimiser la performance des ouvriers (Fig. 6). C’est Bernstein qui a nommé le terme biomécanique pour designer l’étude du mouvement à travers l’application des principes mécaniques.

En 1938, fut publié un livre fondamental sur la biomécanique du sport intitulé Les mouvements du corps humain écrit par Michael Ivanitski (1895–1969). Il fut l’auteur de plus de 100 articles scientifiques basés sur l’anatomie fonctionnelle du mouvement par rapport à la pratique de l’éducation physique et sportive. Des scientifiques russes de la moitié du 20ème siècle, il faut considérer Lev Nikolaev (1898-1954) dont l’ouvrage Guide de la biomécanique appliquée à l’orthopédie, la traumatologie et les prothèses (1947-1950) montre son expérience acquise lors de la seconde guerre mondiale.
Dans les années 1930, le scientifique allemand Basler travaille sur la locomotion. Il s’intéresse notamment au centre de gravité du corps humain. Il conçoit un dynamomètre spécial qui lui permet d’étudier les forces de réaction du pied sur le sol à la fois verticalement et horizontalement.
Les premières utilisations de l’électromyographie (i.e., l’enregistrement de l’activité électrique musculaire) ont été réalisées entre 1920 et 1930 par Wachholder et Altenbürger. En étudiant l’activité musculaire lors de différents mouvements, ils démontrent que les muscles sont bien à l’origine du mouvement des segments. Les travaux de ces auteurs auront une influence majeure dans le domaine de l’apprentissage moteur et de la coordination musculaire.
Scherb, un scientifique suisse, publie dans les années 1940 ses travaux sur l’activité musculaire. Il enregistre l’activité électrique musculaire de différents muscles lors de la marche sur tapis roulant. Il appelle sa méthode, la myokinésiologie. Il utilise ses résultats pour diagnostiquer d’éventuels problèmes musculaires et effectuer des contrôles après transplantation musculaire. Il est un des premiers scientifiques à soutenir l’idée que pour des activités automatiques telle que la marche, la stratégie neuromusculaire s’apprend grâce à l’expérience et s’enregistre profondément pour la vie entière.
Entre 1938 et 1943, différentes expérimentations scientifiques menées par le scientifique américain Elftman se sont déroulées dans une université colombienne. Il étudiait la répartition des masses au niveau des pieds, la fonction des bras pendant la marche, les rotations du corps, les forces de réaction du sol pendant la marche, etc. Son nom est surtout lié à la conception de la première plateforme de force moderne dont le fonctionnement fut décrit dans la célèbre revue scientifique Science en 1938 (Fig. 7).
A la fin de la seconde guerre mondiale, la recherche expérimentale en biomécanique en Allemagne est pratiquement arrêtée et elle est fortement affaiblie dans le reste de l’Europe. Pour des raisons évidentes, sont financés uniquement des travaux portant sur l’aide aux millions d’invalides par la construction de prothèses, d’orthèses et de recherches en orthopédie. Le pôle d’influence scientifique se déplace alors en Amérique du Nord. Cependant vers la fin du 20ème siècle, les sciences d’analyse du mouvement se développeront de nouveaux en Europe et en Asie.
II. Description anatomique du mouvement
En biomécanique du sport et de l’exercice, l’analyse descriptive d’une position ou d’un mouvement dans l’espace doit être compréhensible par tous. Pour cela, une codification du langage a été mise en place afin que toutes les personnes désireuses de communiquer entre elles sur l’analyse du mouvement puissent se faire comprendre clairement. L’objectif de ce deuxième chapitre est de vous fournir et de vous expliquer cette terminologie scientifique spécifique utile à une bonne compréhension de la description anatomique d’une position ou d’un mouvement.

A. Plans et axes de référence
Pour décrire une position ou un mouvement, il est nécessaire de pouvoir expliquer quelle est la situation du sujet par rapport à l’observateur (i.e., comment l’observateur voit le sujet : de face, de dos, de 3/4, latéralement, etc.) et de quelle manière le sujet effectue son mouvement (e.g., le sujet effectue une rotation mais est-ce d’avant en arrière, de droite à gauche ?). Pour répondre à ces interrogations, nous allons nous servir des plans et des axes de référence qui sont définis par rapport à la position standard anatomique humaine, position dite de Paul Poirier.
Cette position anatomique se décrit de la manière suivante (Fig. 8) :
- Le sujet est en position debout, face à l’observateur.
- Le regard est droit, à l’horizontale, tourné vers l’avant, perpendiculaire au grand axe du corps.
- les bras sont sur les cotés, étendus le long du corps.
- Les paumes des mains sont tournées vers l’avant, c’est-à-dire en supination.
- Les pieds sont serrés et parallèles. Leurs pointes sont légèrement écartées.
1. Les plans
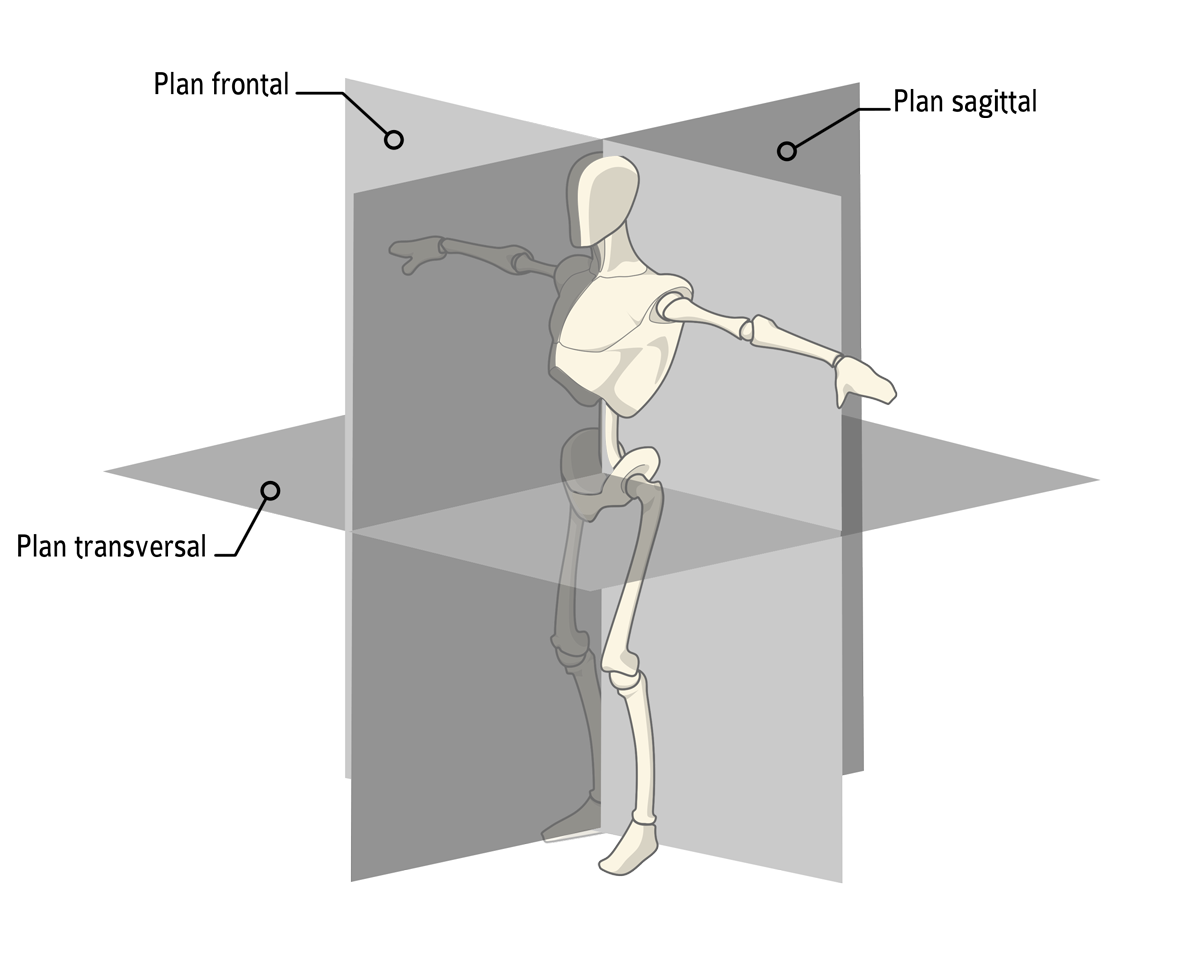
À partir de la position anatomique de référence, on décrit trois plans imaginaires en 2 dimensions qui passent par le centre de gravité du corps humain et qui sont perpendiculaires les uns par rapport aux autres. On distingue le plan sagittal, le plan frontal et le plan transversal. Ils sont représentés en Figure 9 et décrits ci-après. Le plan est une vue 2D d’un corps ou d’un objet.
a. Le plan sagittal
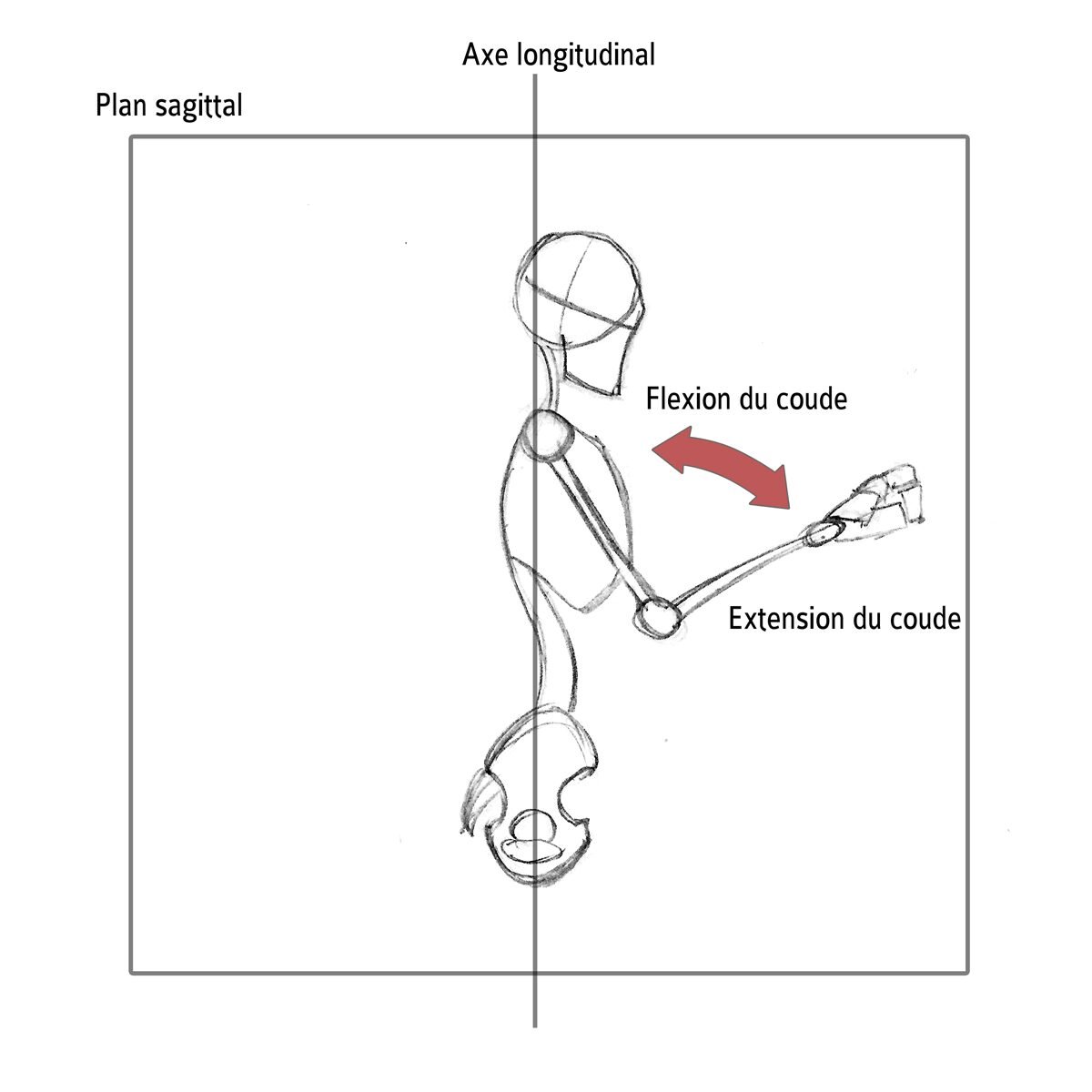
C’est un plan vertical qui passe par la ligne médiane du corps et le divise en deux parties symétriques, droite et gauche (Fig. 9). C’est dans ce plan que des activités telles que la marche, la course à pied et le saut en longueur par exemple sont le plus souvent étudiées.
b. Le plan frontal
C’est un plan vertical perpendiculaire au plan sagittal qui divise le corps en deux parties symétriques, antérieure (ventrale) et postérieure (dorsale) (Fig. 9). C’est dans ce plan que les mouvements de déhanchement au cours de la marche et de la course à pied, l’aire projetée des cyclistes ou la torsion des chevilles sont étudiés.
c. Le plan transversal
C’est un plan horizontal, parallèle au sol, qui divise le corps en deux parties symétriques, supérieure (du côté de la tête) et inférieure (du côté des pieds) (Fig. 9). C’est dans ce plan que les torsions des épaules par rapport aux hanches seront observées.
Pensez également qu’en plus de ces 3 plans de référence, il existe une multitude de plans parallèles à ceux-ci dans lesquels il est possible d’étudier une partie du mouvement en isolant une fraction du corps. Les plans permettent la translation, c’est-à-dire le déplacement rectiligne d’un objet. Nous reviendrons plus tard dans le cours sur ces notions.
2. Les axes
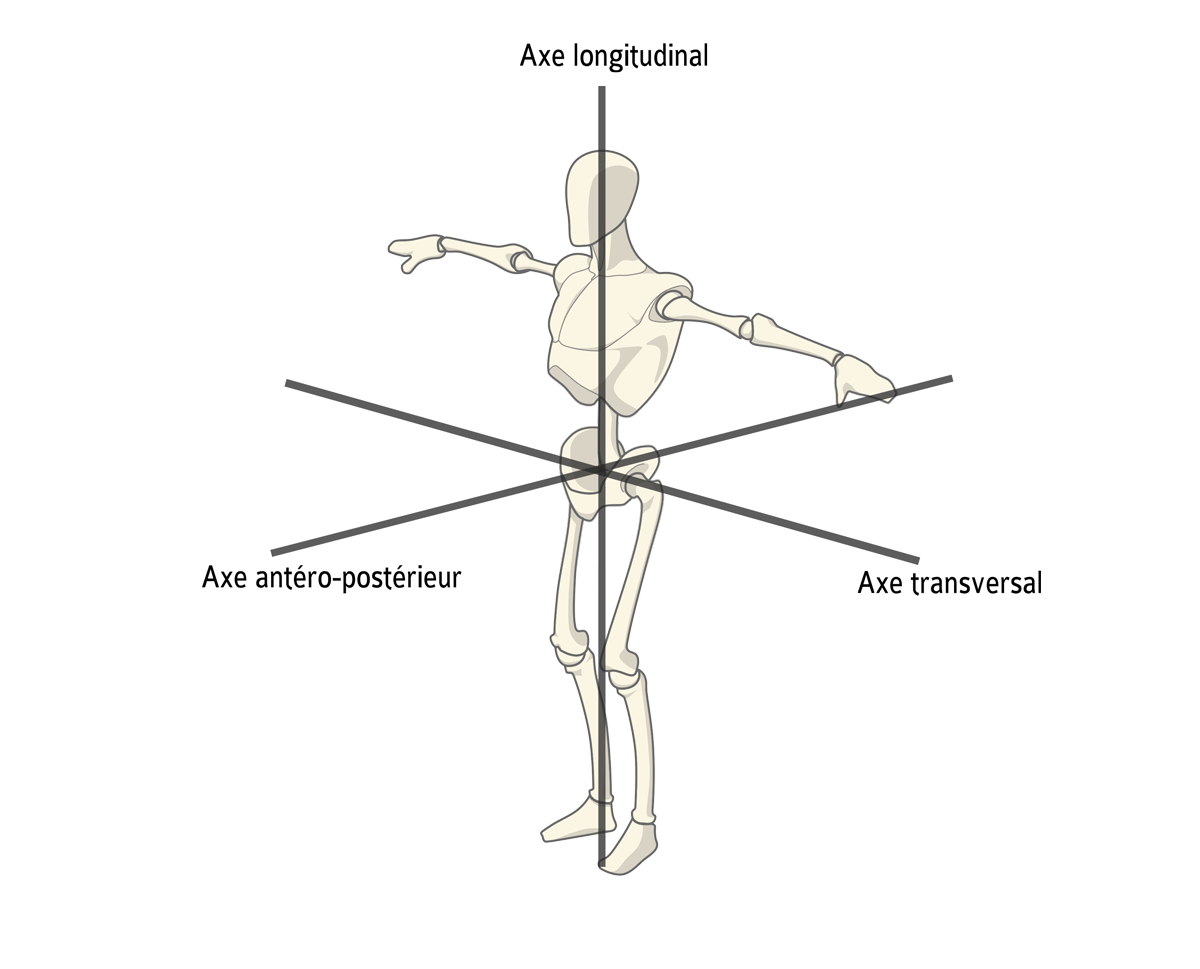
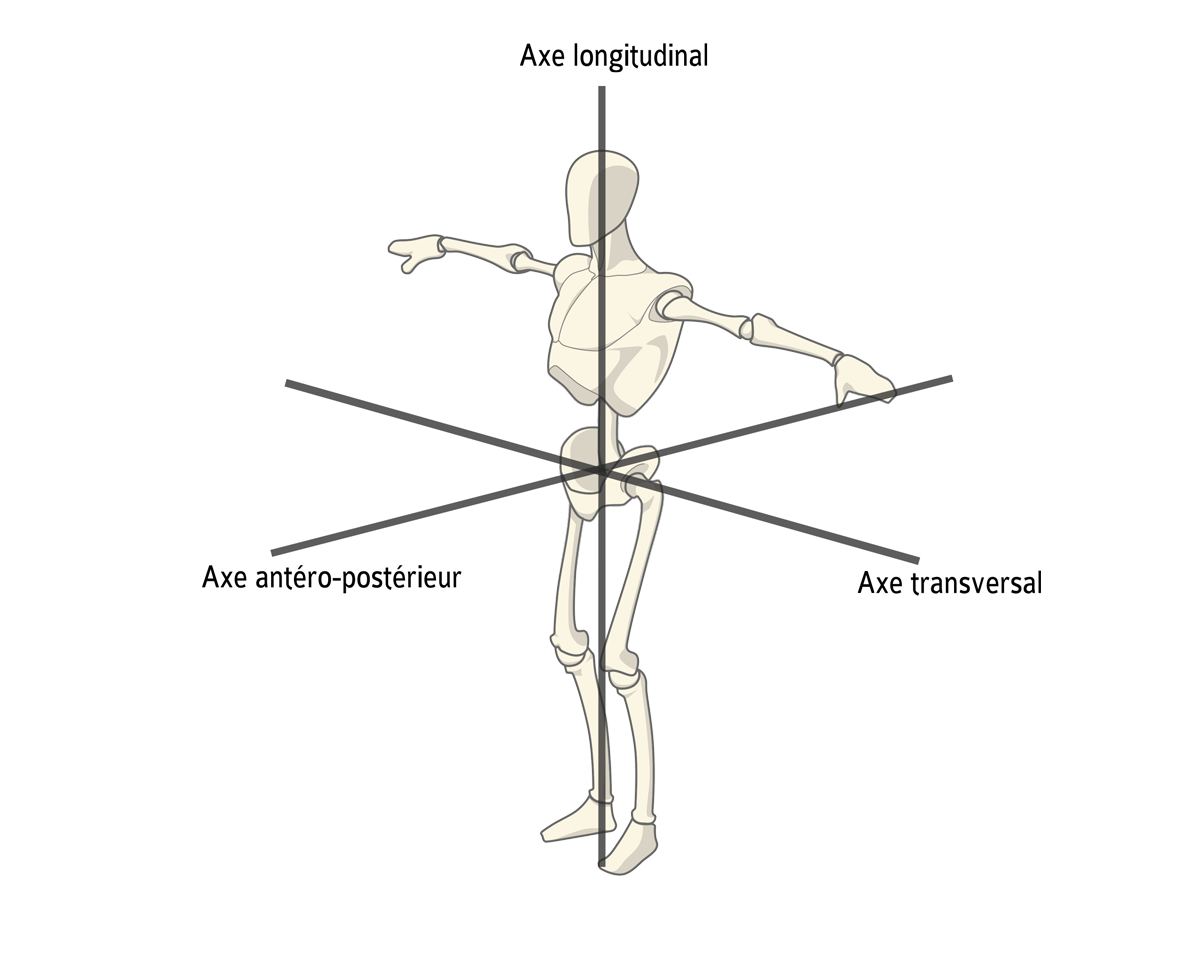
Vous pouvez vous représenter un axe comme une ligne imaginaire autour de laquelle s’effectue une rotation ou bien comme une ligne qui représente une direction que suit un objet. Prenons comme exemple une roue de bicyclette, au centre du moyeu de la roue se trouve l’axe de rotation (la roue tourne bien autour de cette axe) tandis que la roue décrit un plan perpendiculaire à l’axe. Les axes peuvent être définis par l’intersection de deux plans, par exemple, l’axe longitudinal est à l’intersection du plan sagittal et du plan frontal. Les axes anatomiques de référence sont au nombre de 3 : antéro-postérieur, transversal et longitudinal (Fig. 10). Ils sont définis perpendiculairement aux plans de que nous venons de décrire.
a. L’axe antéro-postérieur
Il passe horizontalement d’arrière en avant et est formé par l’intersection des plans sagittaux et transversaux. Il est perpendiculaire au plan frontal (Fig. 10). Lorsqu’une gymnaste effectue une roue, son corps tourne autour de cet axe.
b. L’axe transversal
Il passe horizontalement de gauche à droite et est formé par l’intersection des plans frontaux et transversaux. Il est perpendiculaire au plan sagittal (Fig. 10). Lors d’une roulade ou d’un salto, le corps tourne autour de cet axe.
c. L’axe longitudinal
Il passe verticalement de haut en bas et est formé par l’intersection des plans sagittaux et frontaux. Il est perpendiculaire au plan transversal (Fig. 10). En danse classique, lors d’une pirouette, le corps tourne autour de cet axe.
3. Orientation dans l’espace
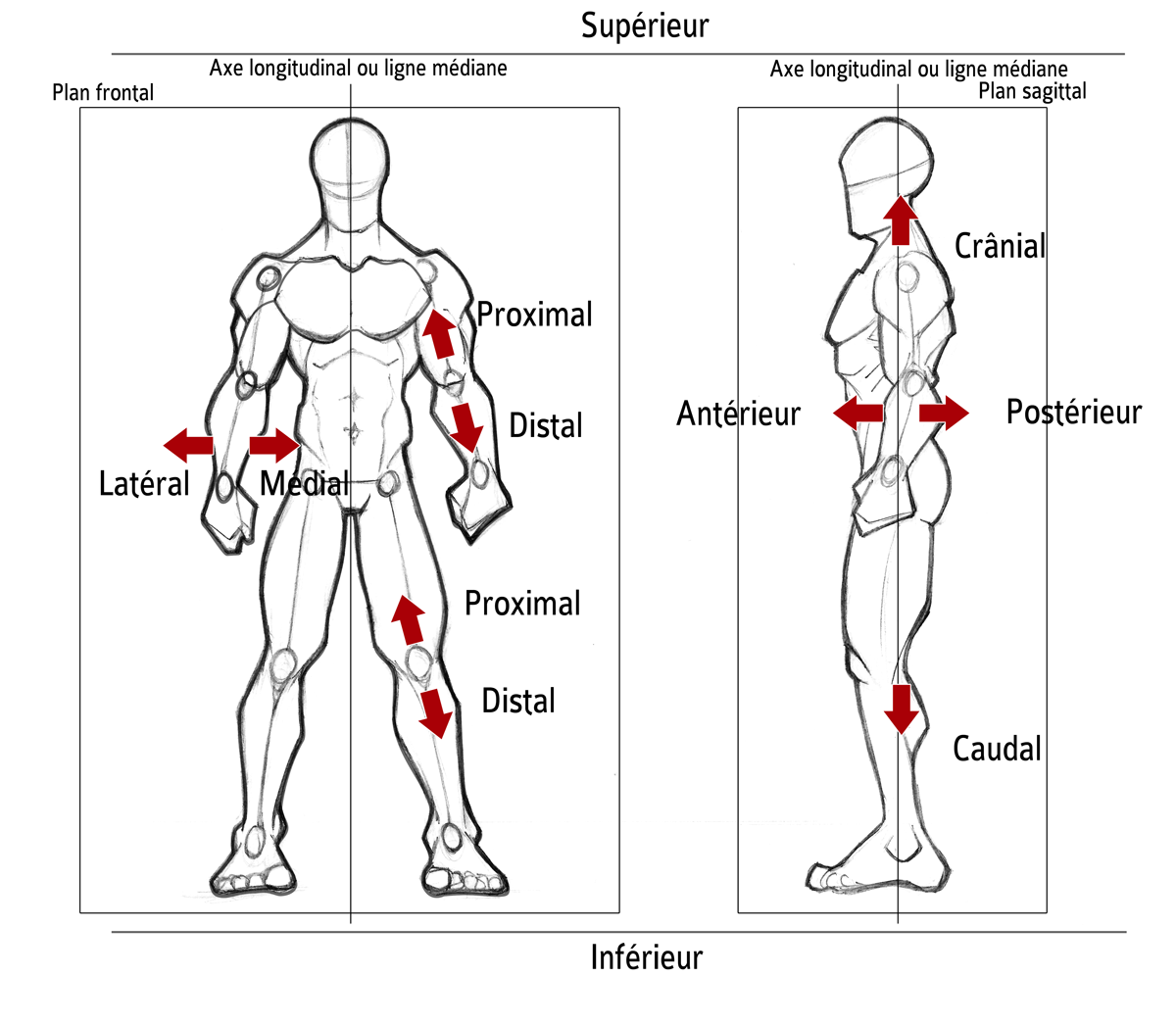
Les plans et les axes représentent la structure globale de l’analyse descriptive d’une position ou d’un mouvement. Néanmoins, il convient d’utiliser des termes qui permettent d’être encore plus précis pour décrire selon quel point de vue nous observons un corps, mobile ou non. Tous les termes sont illustrés en Figure 11.
a. Antérieur vs. Postérieur
Antérieur (ou ventral) : Si vous regardez le corps humain dans le plan sagittal, le plan frontal ou l’axe longitudinal divise le corps en deux parties. Antérieur correspond à la partie avant du corps (Fig. 11). Par exemple, le nez se situe sur la face antérieure de la tête et les pectoraux sont sur la face antérieure du corps humain.
Postérieur (ou dorsal) : Si vous regardez le corps humain dans le plan sagittal, le plan frontal ou l’axe longitudinal divise le corps en deux parties. Postérieur correspond à la partie arrière du corps (Fig. 11). Par exemple, les omoplates et les fesses se situent sur la face postérieure du corps humain. Dorsal désigne aussi la face arrière de la main et la face supérieure du pied.
b. Médial vs. Latéral

Médial : Lorsque vous observez le plan frontal, ce qui est médial est proche de l’axe longitudinal du corps humain (Fig. 11). Par exemple, dans le plan frontal, les yeux sont plus médians que les oreilles.
Latéral : Lorsque vous observez le plan frontal, ce qui est latéral est éloigné de l’axe longitudinal du corps humain (Fig. 11). Par exemple, les oreilles sont latérales par rapport aux yeux.
c. Inférieur vs. Supérieur
Supérieur (ou Crânial) : Le corps humain est divisé en deux parties par le plan transversal, la partie supérieure correspond à la partie haute, c’est-à-dire la portion la plus éloignée des pieds en position debout (Fig. 11). Par exemple, la poitrine est supérieure à l’abdomen.
Inferieur (ou Caudal): Le corps humain est divisé en deux parties par le plan transversal, la partie inférieure correspond à la partie basse, c’est-à-dire la portion la plus éloignée de la tête en position debout (Fig. 11). Par exemple, les jambes sont inférieures aux cuisses.
d. Proximal vs. Distal
Proximal : Le terme proximal désigne ce qui est proche du point d’attache au corps (Fig. 11). Par exemple, le coude est dit proximal par rapport au poignet. En effet, le coude est plus proche de l’articulation de l’épaule (i.e., le point d’attache au corps) que ne l’est le poignet.
Distal : A l’inverse, distal désigne ce qui est éloigné du point d’attache au corps) (Fig. 11). Par exemple, la cheville est dit distale par rapport au genou. En effet, la cheville se trouve plus près de l’extrémité du membre inférieur que le genou.
e. Superficiel vs. Profond
Superficiel (i.e., près de la surface) : Cela correspond aux structures proches de la surface du corps. Par exemple, la peau est superficielle par rapport aux muscles.
Profond (i.e.,à l’intérieur) : Cela correspond aux structures éloignées de la surface. Par exemple, les os sont profonds par rapport à la peau. Vous entendrez également parler des muscles profonds, comme les muscles érecteurs du rachis, par exemple.
B. Références anatomiques corporelles
Pour l’analyse du geste sportif, il est possible de décomposer le corps en un ensemble de segments assemblés les uns autres grâce aux articulations. Il devient ainsi plus simple de décrire les mouvements effectués. Cette partie a essentiellement pour objectif de vous faire comprendre la modélisation simple du corps humain afin de vous préparer pour les parties suivantes. Quelques notions d’anatomie seront abordées ici, mais elles seront développées dans un cours dédié.
1. Segments corporels et articulations
Bien qu’il soit une structure très complexe, vous pouvez réduire le corps humain a une structure basique composé de segments. Ces segments sont reliés entre eux par des articulations. Comme leur nom l’indique, les articulations servent à articuler les segments les uns par rapport aux autres. Elles permettent donc le mouvement.

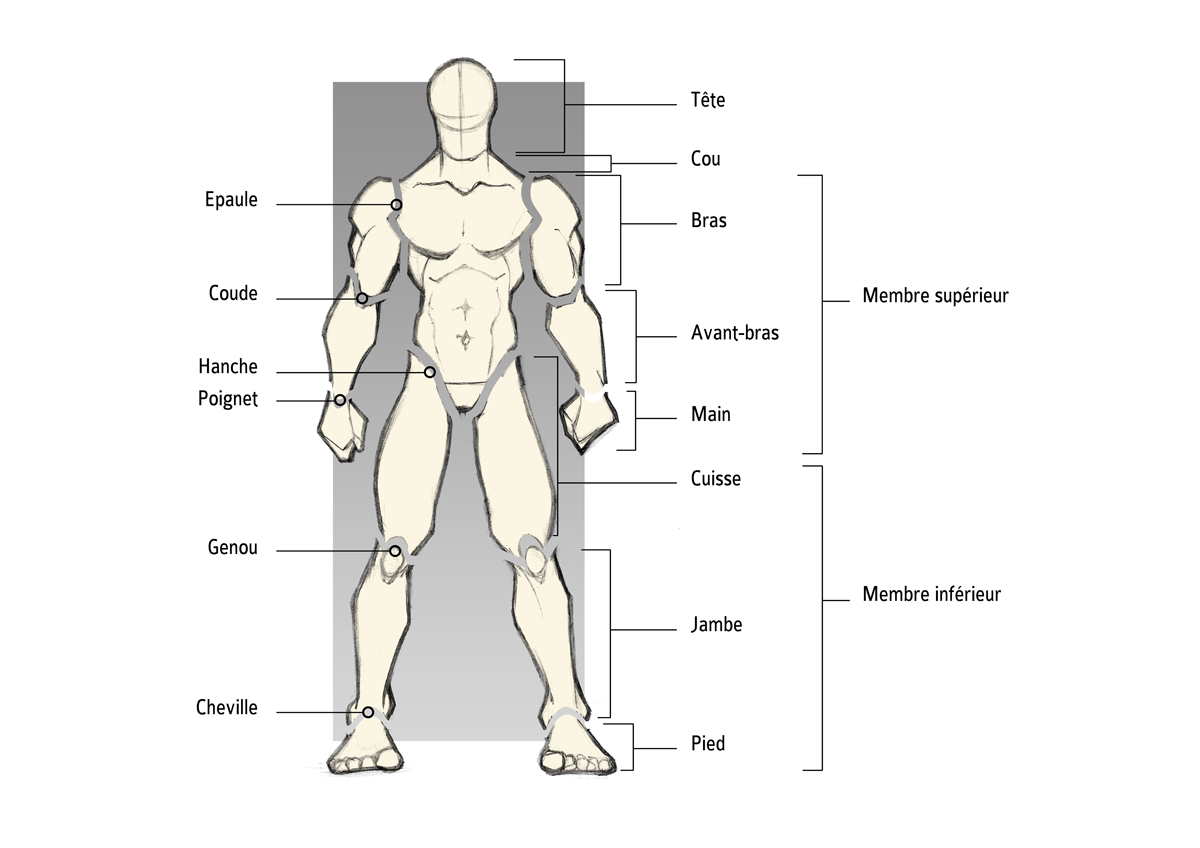
a. Segments corporels
Pour délimiter les segments corporels sur un sportif, les biomécaniciens utilisent des repères anatomiques osseux précis, palpables sous la peau. C’est ainsi que sont mesurés les segments corporels (Fig. 12). Voici la liste des segments corporels utilisés en biomécanique :
b. Articulations
Lors de l’analyse du mouvement, seules les principales articulations sont généralement prises compte. Comme vous l’avez vu pour les segments corporels, sur une étude global du corps, le tronc, la main et le pied sont considérés dans leur globalité. Bien sûr, si vous ne devez étudiez que le mouvement des doigts d’un pianiste, il faudra considérer chaque phalange et chaque articulation de la main. Les articulations principales sont donc (Fig. 12):
Ces notions sont très simples à retenir, et il est important que lorsque vous décriviez un mouvement, vous fassiez clairement la différence entre membre supérieur et bras, et membre inférieur et jambe. En effet, “bras” et “jambe” sont des termes employés par la plupart des gens pour désigner les membres inférieurs et supérieurs. Il vous faut noter également qu’ici les articulations sont décrites de manière simplifiées. Nous verrons dans le cours consacré à l’anatomie que les dénominations sont bien plus précises et qu’il existe beaucoup plus d’articulations dans le corps humain.
2. Type d’articulation
Une articulation représente le point où deux ou plusieurs os se rencontrent. Le corps humain comprend trois principaux types d’articulation. Chacune d’elles offre une mobilité différente :
a. Articulation fibreuse
Dans ce type d’articulation, les os sont unis par du tissu fibreux. Ces articulations ne permettent aucune mobilité, on parle alors de synarthrose. Il existe 3 sous-catégories :
b. Articulation cartilagineuse
Ce sont des articulations composées de cartilage hyalin ou de fibrocartilage et unissant ainsi les os. Ces articulations permettent une mobilité réduite, on parle alors d’amphiarthrose. Il existe 2 sous-catégories :
c. Articulation synoviale
Ce sont des articulations très communes dans le corps humain. Ce sont elles qui unissent principalement les segments corporels. Les os sont solidement attachés l’un à l’autre par des ligaments. Elle se caractérise par la présence d’une capsule articulaire composée d’une membrane fibreuse et d’une membrane synoviale, sécrétant un liquide particulièrement lubrifiant : la synovie. Ce liquide permet d’éviter l’usure précoce des cartilages articulaires présents sur chaque os. Ces articulations permettent une grande mobilité, on parle alors de diarthrose. L’amplitude de mouvement articulaire et les degrés de liberté possibles sont fonction de la forme géométrique de l’articulation. Elles sont classées en 6 types différents (Fig. 13-18) :
Articulation sphéroïde ou énarthrose (Fig. 13) : Une tête sphérique convexe vient se loger dans une cavité sphérique concave. Exemple : L’articulation coxo-fémorale (i.e., la hanche) ou l’articulation scapulo-humérale (i.e., l’épaule). Ce type d’articulation permet 3 degrés de liberté et donc une très grande mobilité : flexion / extension, abduction / adduction, rotation externe / interne et circumduction.
Articulation en selle (Fig. 14) : Deux têtes concaves viennent s’emboiter perpendiculairement. Exemple : L’articulation trapezo-metacarpienne (i.e., le pouce). Ce type d’articulation permet 2 degrés de liberté : flexion / extension et abduction / adduction.
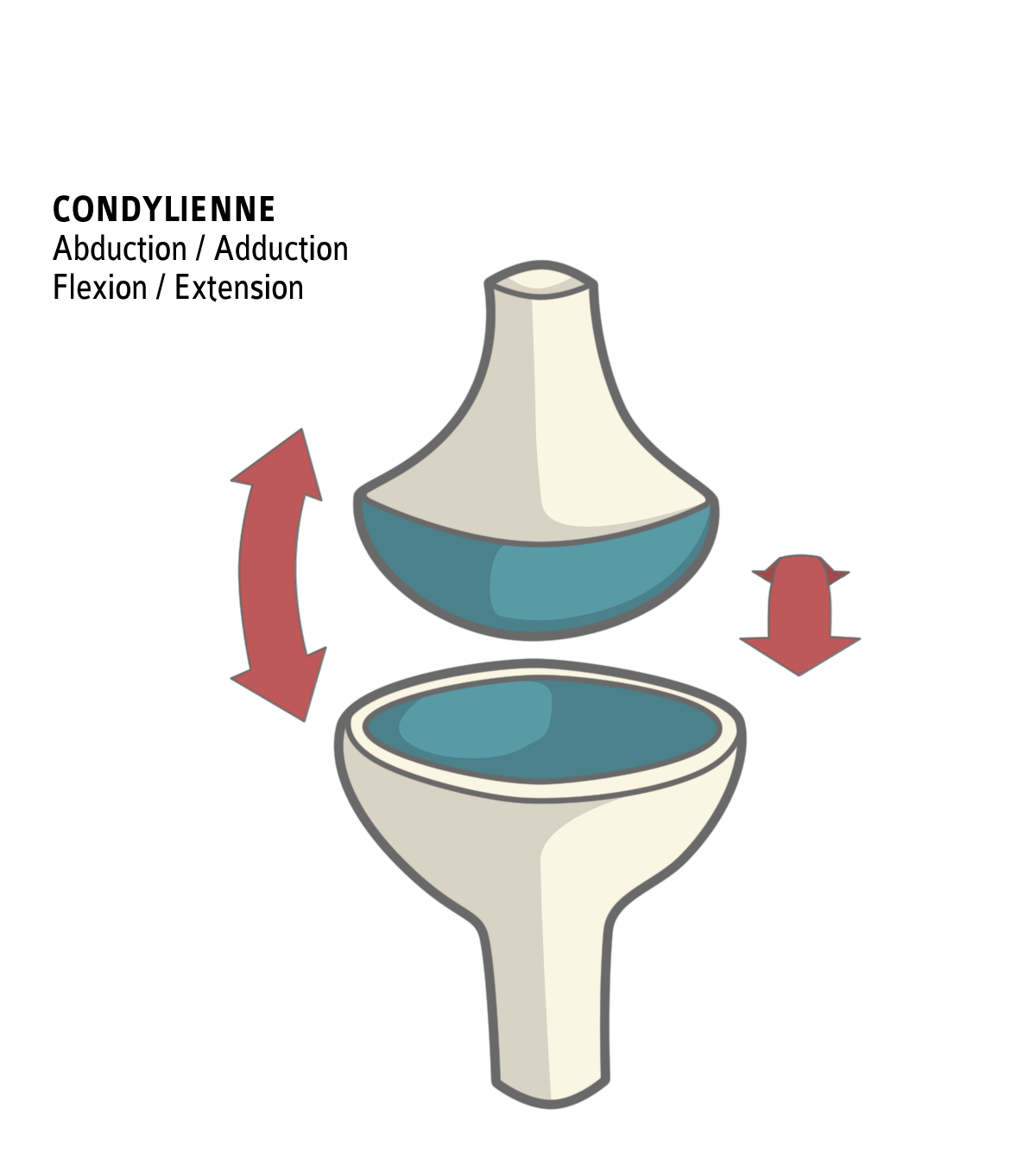
Articulation condylienne (Fig. 15) : Une tête ellipsoïdique convexe vient se loger dans une cavité ellipsoïdique concave. Exemple : L’articulation radio-carpiale (i.e., le poignet). Ce type d’articulation permet 2 degrés de liberté : flexion / extension et abduction / adduction.
Articulation trochléenne ou ginglyme (Fig. 16) : L’articulation forme une charnière. Exemple : L’articulation olécranienne (i.e., le coude) ou l’articulation fémoro-patellaire (i.e., entre le fémur et la patella). Ce type d’articulation ne permet qu’un seul degré de liberté : flexion / extension.
Articulation trochoïde (Fig. 17) : Un cylindre convexe vient se loger dans un cylindre concave. Exemple : L’articulation radio-ulnaire (i.e., l’avant-bras). Ce type d’articulation ne permet qu’un seul degré de liberté : rotation externe / interne.
Articulation plane ou arthrodie (Fig. 18) : Deux surfaces planes sont en contact. Exemple : Les articulations entre les os du carpe (i.e., de la main). Ce type permet 3 degrés de liberté mais avec très peu d’amplitude.





C. Mouvements articulaires
Le corps possède une grande variété de mouvements articulaires. Ceux-ci sont dépendants de l’articulation et de sa forme anatomique comme vous venez de le lire dans la partie précédente. Une bonne connaissance des mouvements anatomiques est nécessaire pour réaliser une analyse descriptive correcte des mouvements humains. Chaque mouvement anatomique est effectué dans un plan spécifique autour d’un axe spécifique. Avec ces connaissances, il est possible d’observer le geste sportif, et de le décomposer en plusieurs mouvements articulaires pour évaluer l’influence du mouvement de l’individu sur la performance.
1. Flexion / Extension
La flexion est un mouvement qui diminue l’angle au niveau de l’articulation en mouvement en rapprochant les uns des autres les segments d’un membre. Tandis que l’extension augmente l’angle au niveau de l’articulation en mouvement en alignant les segments d’un membre. De nombreux types d’articulations synoviales sont capables de flexion et d’extension. Cela comprend l’articulation de l’épaule (Fig. 19), de la hanche (Fig. 20), du coude (Fig. 21), du poignet et du genou.
Attention cependant aux dénominations des mouvements articulaires de l’épaule et de la cheville. En effet, la flexion de l’épaule est souvent appelée antépulsion, et l’extension de l’épaule appelée rétropulsion. La fexion du pied sur la jambe (i.e., lorsque vous pointez les orteils vers le haut) est appelée dorsiflexion. Mais l’extension de la cheville (i.e., lorsque vous tendez le pied pour l’aligner avec la jambe) est appelée flexion plantaire.


2. Abduction / Adduction
Si on observe dans le plan frontal, le corps humain en position anatomique de référence, l’abduction correspond à une rotation latérale d’un segment corporel qui s’éloigne du corps. A l’inverse, l’adduction correspond à une rotation médiale qui rapproche le segment corporel du corps. La Figure 15 illustre ce mouvement articulaire au niveau de l’épaule et de la hanche.
3. Rotation externe / interne
La rotation est un mouvement d’un os autour de son axe longitudinal et s’effectue dans le plan transversal. Lorsque la face antérieure de l’os tourne et s’éloigne de la ligne médiane du corps, on parle de rotation externe. À l’inverse, lorsque la face antérieure de l’os tourne et se rapproche de la ligne médiane, c’est la rotation interne. Les articulations qui permettent les rotations externe et interne comprennent, entres autres, l’épaule (Fig. 23) et la hanche.



4. Pronation / Supination
Au niveau de l’avant-bras, la supination et la pronation désignent la position relative du radius et de l’ulna (les deux os de l’avant-bras). En supination, position anatomique de référence, le radius est latéral par rapport à l’ulna, et la paume de la main est orientée vers l’avant. En pronation, le radius passe en avant de l’ulna, et la main effectue une rotation interne, pour finalement que la paume soit orientée vers l’arrière (Fig. 24).

5. Valgus / Varus
Varus et valgus caractérisent l’éloignement ou le rapprochement de la partie distale d’un segment par rapport à l’axe longitudinal du corps. Dans le cas du genou, le varus correspond à une rotation externe du fémur, ce qui éloigne latéralement l’articulation du genou se traduisant visuellement par des jambes arquées. A l’opposé, le valgus est une rotation interne du fémur qui rapproche le genou de l’axe longitudinal, avec pour résultat des genoux dits “cagneux” ou “en X” (Fig. 25).
6. Inversion / Eversion
Ces deux termes sont spécifiques à l’articulation de la cheville. L’éversion (Fig. 26) correspond à une rotation externe latérale. Dans le cas de l’os du talon (le calcaneum), la plante de pied est orientée latéralement. À l’inverse, l’inversion (Fig. 27) est une rotation interne médiale. La plante de pied est orientée médialement.
Vous avez sûrement remarqué que pour choisir une chaussure de sport, il est de plus en plus courant de parler de pieds “pronateurs”, “supinateurs” ou “universel”. Dans ce cas, la pronation correspond à une éversion du calcaneum, une dorsiflexion de la cheville et une abduction de l’avant du pied. Le déroulé du pied s’effectue principalement sur l’intérieur du pied. Quant à la supination, elle comprend une inversion du calcaneum, une flexion plantaire de la cheville et une adduction de l’avant du pied. Le déroulé du pied s’effectue principalement sur l’extérieur du pied.
7. Circumduction
La circumduction est un mouvement circulaire combinant les mouvement d’abduction, d’adduction, de flexion et d’extension de l’articulation. Par exemple, dessiner un cercle avec le membre supérieur tendu représente une circumduction (Fig. 28). On retrouve ce type de mouvement au niveau de l’épaule et de la hanche.



D. Coordonnées
Tout au long de ce chapitre, vous venez de comprendre que le geste sportif se réalisait selon des mouvements articulaires précis qui s’effectuaient selon des plans et des axes spécifiques. Or, pour une analyse descriptive du mouvement, il est possible d’être encore plus précis en localisant dans l’espace la position d’un point ou d’un ensemble de point. Ces points peuvent représenter des articulations et des segments.
En biomécanique du sport et de l’exercice, la description du mouvement d’un corps peut se faire dans un espace bidimensionnel (i.e., 2D), par exemple, lorsque vous observez une personne marcher dans le plan sagittal. Mais cettte étude peut également se faire dans un espace tridimensionnel (i.e., 3D). Dans ce cas, votre champ de vision permet de visualiser plusieurs plans dans l’espace. C’est pourquoi il est nécessaire de définir l’espace dans lequel se produit le mouvement, c’est-à-dire selon quel point de vue vous vous placez pour observer le geste sportif.
1. Coordonnées 2D et 3D
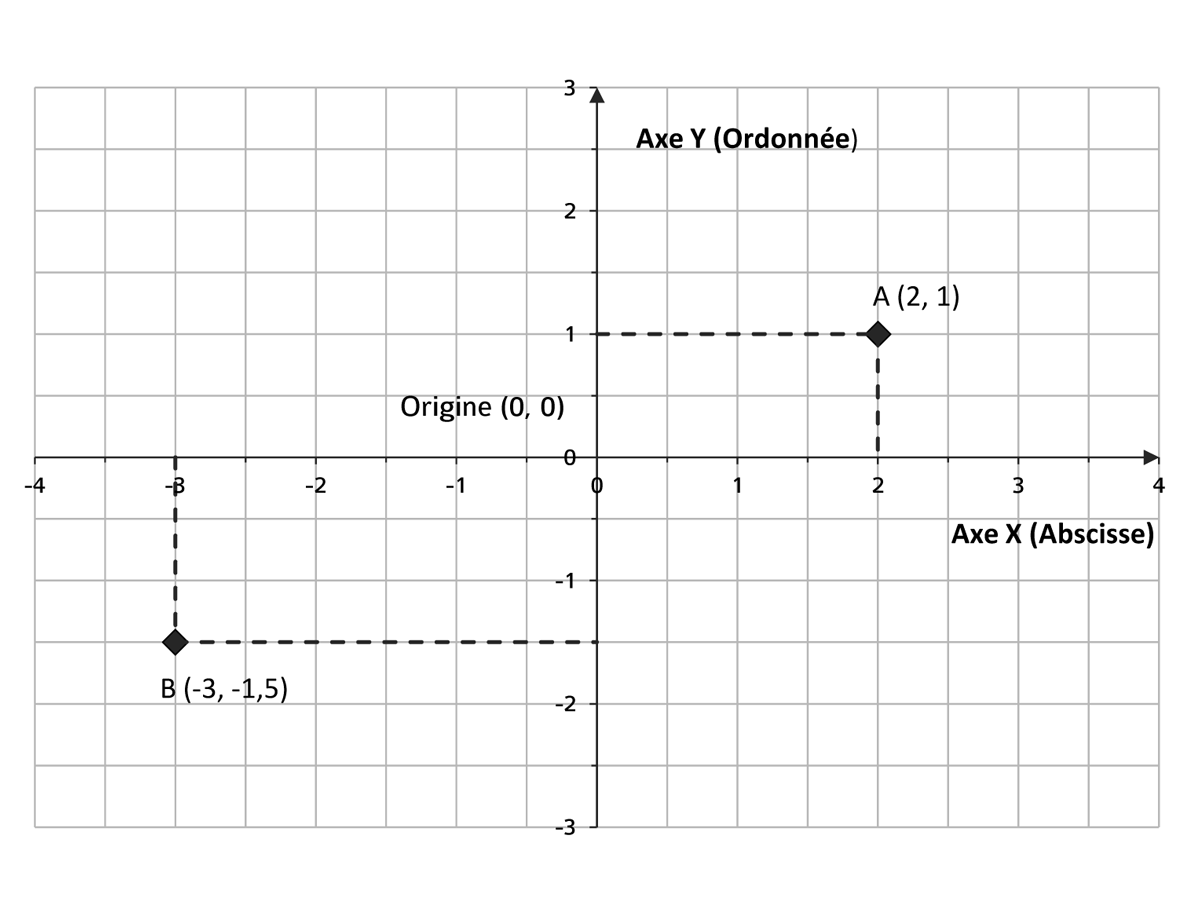
Dans un espace bidimensionnel, c’est-à-dire un plan, se trouvent deux axes perpendiculaires l’un à l’autre : un axe vertical (l’abscisse et un axe horizontal (l’ordonnée). L’intersection de ces deux axes forme l’origine, c’est-à-dire le point 0. Sur ce plan 2D, la position d’un point est décrite par 2 valeurs : une valeur horizontale et une valeur verticale. Ce sont ses coordonnées (Fig. 29).
Un troisième axe, l’axe z est nécessaire pour décrire le mouvement dans un espace tridimensionnel. Cet axe passe par l’origine et est perpendiculaire aux axes X et Y décrits ci-dessus. La Figure 30 montre ce troisième axe et les plans définis par ces trois axes. Dans ce cas, la position d’un point sera décrite par 3 valeurs : une valeur horizontale, une valeur verticale et une valeur de profondeur.

{kind=link}
{kind=link}
{kind=link}
Pour l’instant, retenez simplement que ces coordonnées permettent de décrire la position précise d’un point à un temps donné. Le concept simple de coordonnées horizontale et verticale doit être clair car il sera réutilisé de nombreuses fois tout au long de ce cours. Mais ne vous inquiétez pas, nous détaillerons dans d’autres chapitres, l’utilisation de ces coordonnées.
2. Systèmes de coordonnées
Comme nous venons de l’expliquer, l’étude d’un geste dépend du point de vue de l’observateur. Selon sa position, l’analyse du mouvement sera soit bidimensionnelle, soit tridimensionnelle. Vous avez également compris que chaque point dans l’espace observé possède des coordonnées. Cependant, ces coordonnées nécessitent un point d’origine. Il est donc nécessaire de définir un système de coordonnées pour décrire les mouvements observés.
{kind=link}
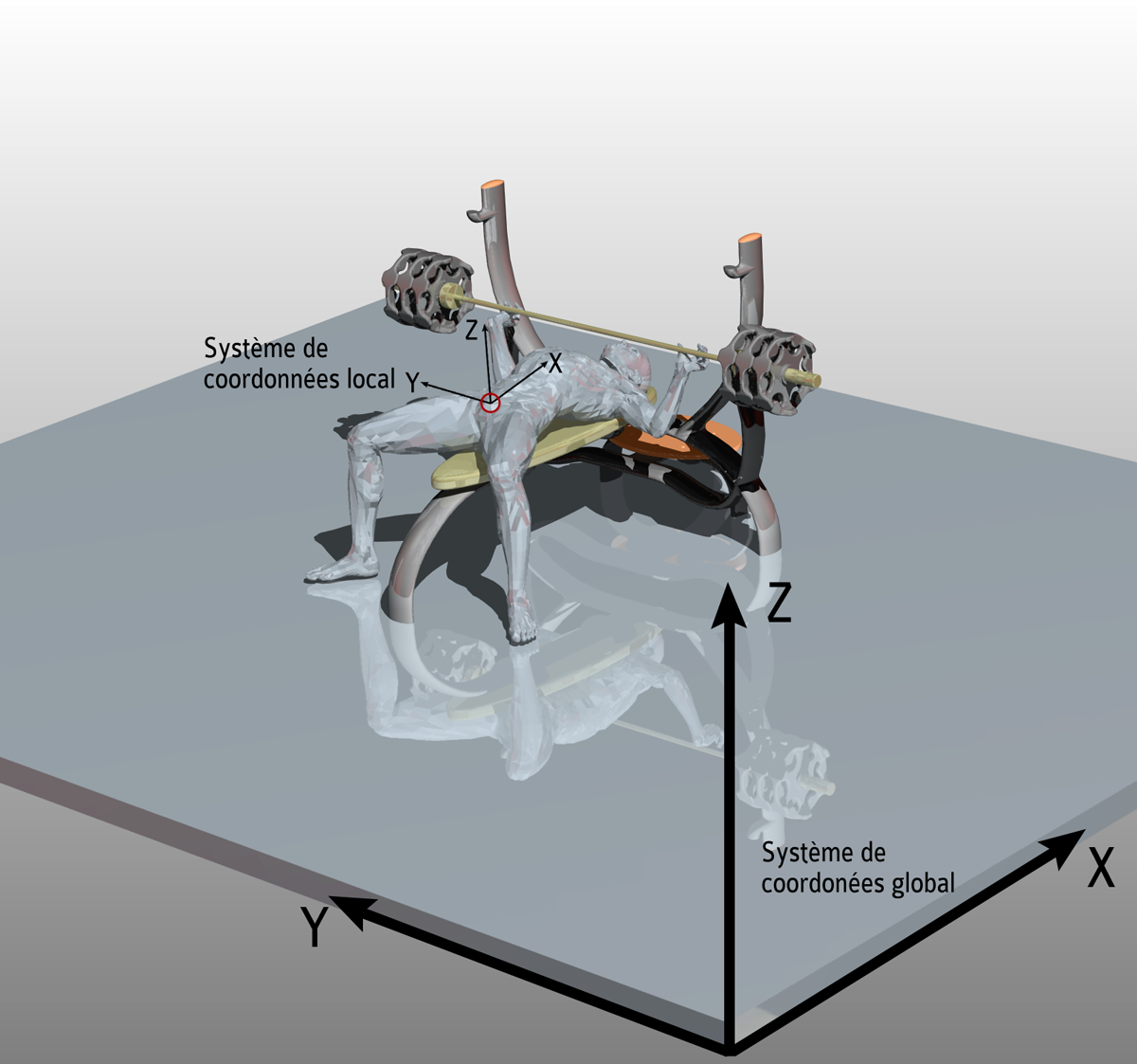
a. Système de coordonnées global
Le système de coordonnées global (également connu sous le nom de référentiel galiléen ou inertiel) est utilisé pour déterminer la position d’un individu par rapport à la pièce où il évolue, par exemple. Cette position permet de décrire toutes les autres positions qui seront observées au cours de l’analyse du mouvement de cet individu.
b. Système de coordonnées local
Quant au système de coordonnées local, il permet de décrire une positon par rapport au corps ou à un segment. Ce système de coordonnes reste fixé au corps ou au segment au cours du mouvement. Son origine est généralement placée au niveau du centre de gravité du corps ou sur le centre de masse du segment.

La Figure 31 illustre la relation entre ces deux systèmes de coordonnées lors de l’analyse du mouvement en développé couché. Le système de coordonnées global est immobile, tandis que le système de coordonnées local se déplace avec le corps ou le segment auquel il est attaché.
III. Quiz
Le cours complet de la biomécanique du sport et de l’exercice…