





Aborder la proprioception dans l’entraînement et la préparation physique revient généralement à imaginer en premier lieu toute forme de sollicitations sur des surfaces instables. Héritage du passé ? Approximation dirons nous, comme je l’évoquais déjà dans mon dossier sur la préparation physique en football. Car du fait de nombreuses publications sur le sujet, et bien que nous l’ayons longtemps cru, ce genre de pratique bien qu’intéressante dans quelques cas, est loin de permettre une optimisation de la proprioception, cette perception que l’on cherche à entraîner. Je vous propose de faire le point sur ce terme fourre-tout "le plus mal utilisé dans le système sensori-moteur" (Riemann et al.). Ce "sens très mal connu […] très à la mode, et très commode… pour dissimuler notre ignorance" (Berthoz). Parce que nous le valons bien. Mais elle aussi.
Devant la richesse du sujet, il a été convenu de vous présenter ce dossier en deux parties, en collaboration avec le site Sci-Sport : cette première
partie vous expose les aspects théoriques afin de mieux définir et comprendre les mécanismes de la proprioception.
La seconde partie que vous pourrez retrouver sur mon site,
développe des aspects plus pratiques. Chaque partie
de ce dossier peut être consultée dans l'ordre qui vous convient et selon les informations que vous recherchez.
Bonne lecture !
Ne nous y méprenons pas. Les acteurs avisés du milieu médical et du monde de l’entraînement comme ceux auxquels je fais référence le savent bien : il est réducteur et faussé de considérer le simple fait de se mettre sur une surface instable comme une manière d’entraîner et d’appréhender la proprioception. Et cela, malgré les nombreux titres et commentaires (moins éclairés) qui prétendent le contraire. Et qui, par exemple, peuvent accompagner des publications illustrant les contenus proposés à des sportifs de haut niveau (à l’image de la vidéo de la FFF), servant dès lors de références. En conséquence, vous me demanderez certainement quel type de travail est alors réalisé par les joueurs du Real Madrid (image principale et vidéo de la seconde partie), vainqueurs historiques de la dernière Ligue des Champions, de l’équipe de France de Football et par ce badiste (joueur de badminton) sur leur coussin de "proprio" ou leur Bosu® (vidéo ci-dessous) ?
Séance de musculation à l'@INSEP_PARIS, équipe de France de badminton (@FFBaD). Travail proprioceptif avant exercice avec barre chargée. 1/2 pic.twitter.com/Jh0AoNk8GH
— Simon Farvacque (@Sporthinker) 21 avril 2017
D’après vous :
Vous trouverez la réponse à la fin de la deuxième partie de l’article. Mais en attendant je vous propose de poursuivre pour comprendre, sur la base d’ouvrages comme de publications spécialisés et scientifiques ayant abordé la thématique.
Tout autant que les surfaces instables auxquelles on se réfère et sur lesquelles on se jette lorsqu’on aborde la "proprio", la manière dont on la définit se limite communément à "la perception consciente ou non de la position des différentes parties du corps dans l’espace". Ou d’une manière plus générale comme "la connaissance globale de notre corps dans l’espace, la connaissance de la position (statesthésie) et des mouvements (kinesthésie) des différentes partie du corps, ainsi que la connaissance de la tension musculaire développée" (Gasq et al., 2012).
Pour un même terme, les approches diffèrent ce que soulignent également Todd et al. (2012). Essayons d’amener quelques précisions.
Avant toute chose, et pour poser les bases de notre réflexion, je vous invite à visionner la vidéo qui suit d’Anatomie 3D Lyon dans laquelle Christian Collet, l’auteur (qui a été un de mes tuteurs de mémoire et que je salue), considère que la statesthésie (sensibilité posturale) et la kinesthésie, dont la perception de chacune d’elles est permise par des récepteurs musculaires et articulaires, constituent la proprioception.
Alain Berthoz dans son livre "Le sens du mouvement", dont le titre est particulièrement évocateur (et qui fait référence aux travaux de Sherrington), énonce la kinesthésie comme un sens à ajouter aux cinq sens traditionnels : le toucher, la vision, l’audition, le goût, l’olfaction. Ce "sixième sens" ou sens du mouvement (auquel notre première définition introductive ci-dessus fait référence) a la particularité effectivement, de mettre à contribution plusieurs récepteurs sensoriels situés :
Comme point commun à ces auteurs, c’est à ces deux dernières catégories que nous allons nous intéresser.
De fait, Charles Scott Sherrington, médecin, scientifique et prix Nobel de physiologie ou médecine en 1932 (co-lauréat avec Edgar Adrian pour ses découvertes sur les neurones et les synapses, un terme dont il est l’inventeur), est à l’origine d’importantes investigations en neurosciences concernant notamment le concept de proprioception au début des années 1900. Des recherches qui, s’appuyant sur les travaux de Goldscheider (1889 et 1898) et ses nombreuses mesures de rotations articulaires, ont permis des avancées sur les connaissances que nous avons de ces mécanorécepteurs : les fuseaux neuromusculaires et les récepteurs de Golgi au niveau musculaire, les corpuscules de Pacini et les corpuscules de Ruffini au niveau musculo-articulaire.
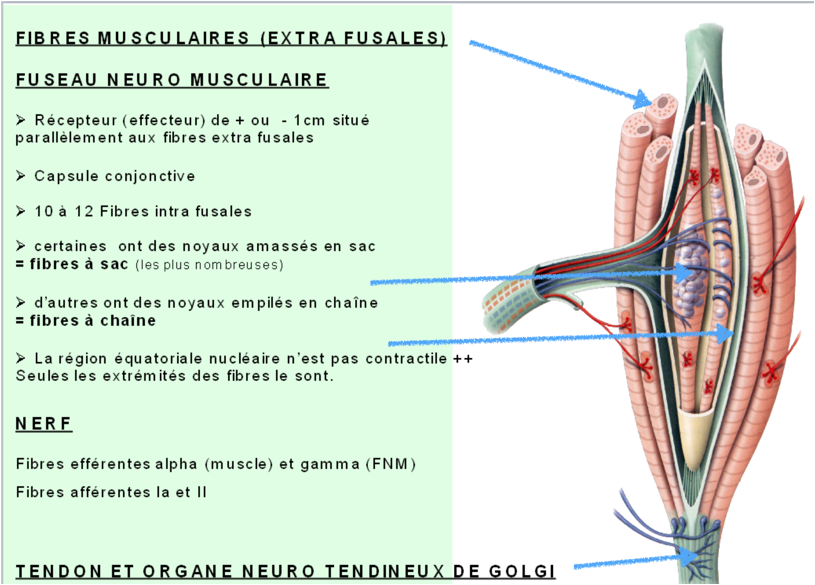
Figure 1. Fuseaux neuromusculaires et organes tendineux de Golgi (Source : Xavier Barbier).
Ces différentes catégories de propriocepteurs – mécanorécepteurs qui assurent la transduction d’une information mécanique (toucher, vibrations, pression, étirement) en signal électrique – peuvent d’après les recherches effectuées par Wang et al. (2016), être divisés en deux types : lentes et rapides. Les récepteurs rapides pouvant réagir dans un délai assez court aux stimuli externes et émettre des impulsions nerveuses : ils incluent, selon ces mêmes auteurs, les corpuscules de Pacini dont la fonction principale est de détecter les paramètres d’accélération et de décélération ainsi que le début et la fin du mouvement. L’action des récepteurs lents, dans lesquels ils intègrent les corpuscules de Ruffini, les organes de Golgi et les FNM, est de détecter les changements de position et le positionnement articulaires précis tout au long du geste. Mais dans un délai plus long. Nous reviendrons sur ces temps de latence. Globalement, ces mécanorécepteurs mesurent donc les mouvements des membres entre eux et constituent, selon Berthoz, la proprioception.
Définition de la proprioception
En déduction, et en concordance avec les différentes publications spécialisées, la proprioception peut être définie comme l’information afférente, incluant le sens de la position articulaire, la kinesthésie, et la sensation de résistance (Todd et al., 2012).
En d’autre terme, la proprioception représente la production d’informations ou signaux transmis au Système Nerveux Central (SNC) issues des différents propriocepteurs situés – dans les muscles, les tendons, les ligaments, les articulations et également les fascias ainsi que la peau – permettant la représentation des mouvements des membres entre eux, non médiée par le sens de la vision.
Comme l’indique Robert Schleip dans cette publication : "Il est généralement surprenant pour beaucoup d’apprendre que notre plus riche et le plus important organe sensoriel n’est pas l’oeil, l’oreille, la peau ou le système vestibulaire mais en fait, nos muscles avec leur fascia associé. Notre système nerveux central reçoit la plus grande partie des nerfs sensitifs de nos tissus myofasciaux." À ce propos, Schleip mentionne l’existence d’une autre catégorie de mécanorécepteurs qui ne demande qu’à être explorée : les récepteurs tissulaires (myofasciaux) interstitiels.
La proprioception qui est donc un système informatif constituant le versant sensoriel du contrôle moteur, s’inscrit bien dans le champ kinesthésique. Mais elle n’est pas la kinesthésie (Proske, 2006) avec laquelle elle est à tort, trop souvent assimilée de la même manière qu’elle l’est avec « la sensation de la position articulaire, la somesthésie (sensibilité générale du corps), l’équilibre et la stabilité articulaire réflexe » (Riemann et al., 2002). Elle n’est pas non plus la statesthésie, bien que, comme le sous-entendait déjà Sherrington à son époque, la proprioception qui s’exprime au travers la motricité statique et dynamique, à la fois réflexe, automatique et volontaire soit impliquée dans la régulation posturale. Et Riemann de signer : "Ainsi, la proprioception correctement décrite aborde les messages nerveux provenant de zones périphériques internes du corps qui contribuent au contrôle de la posture, à la stabilité des articulations, et à plusieurs sensations conscientes." Vous conviendrez qu’il s’agit là d’une forme de subtilité, mais finalement entraîner comme rééduquer ne sont-ils pas une seule et même chose ?
Que l’on soit préparateur physique, kinésithérapeute, ou tout autre praticien et acteur du monde sportif, ce qui normalement nous préoccupe en premier lieu et sur lesquels nos interventions sont fondées dans la gestion du risque de blessures (prophylaxie) et l’optimisation de la performance : la posture et le mouvement (motricité).
Voyons de manière simplifiée comment les mécanismes proprioceptifs s’y manifestent.

Source : Anatomie 3D Lyon
"Mieux comprendre les stratégies du contrôle moteur choisies pour supporter les charges externes et maintenir la stabilité requiert l’interprétation de l’anatomie, la biomécanique et les profils d’activation."
Stuart McGill (2002)
Les objectifs principaux du système sensori-moteur dans lequel s’inscrit la proprioception, et qui permet une communication bidirectionnelle cruciale entre les systèmes sensoriel et moteur, sont d’anticiper, maintenir ou restaurer la stabilité globale du corps d’une part (maintien postural/équilibre) et la stabilité segmentaire et articulaire d’autre part, lors du mouvement. Ainsi, les aspects proprioceptifs, le contrôle musculaire et le contrôle moteur sont liés pour ne pas dire indissociables, comme nous allons le développer.
La proprioception est en substance un mécanisme de rétroaction et de préaction : le corps se déplace ou est déplacé, puis les informations (afférentes) correspondantes sont envoyées au cerveau, à la suite desquelles des ajustements peuvent être apportés afin d’organiser, et de contrôler le mouvement (Berthoz, 2013). Généralement subdivisée en un versant conscient (1) et inconscient (2) qui renseignent respectivement le SNC sur – (1) la position et les mouvements des membres entre eux; (2) le contrôle de la posture. Gasq et al. (2012) affirment que "le terme de proprioception inconsciente usuellement employé pour caractériser le système spino-cérebelleux est probablement abusif. […] La dichotomie entre la voie dite 'consciente' et la voie dite 'inconsciente' est donc artificielle, et n’a pas de raison d’être sur le plan physiologique, étant donné que ces deux voies véhiculent des informations en partie similaires et redondantes". Cette allégation qui a le mérite d’exister est à prendre avec des pincettes, surtout après lecture de ce qui suit.
Vous retiendrez comme l’explique Berthoz, que dans ce système sensorimoteur, le cerveau agit comme un anticipateur biologique faisant des prédictions sur les évènements à venir. Par sa grande plasticité, il s’appuie sur des expériences récentes combinant signes moteurs ou sensoriels ou représentant la procédure nécessaire pour accomplir/ajuster un geste ou atteindre un but grâce au système musculaire. Ceci, dépendamment du retour d’informations sur le succès ou l’échec de l’action réalisée qui précède celle à venir. La raison d’existence du cerveau étant la production de mouvements complexes (cf. travaux de Daniel Wolpert). Les informations concernant le sens kinesthésique ou l’appréciation consciente de la position des membres rapportée à la gravité, sont traitées à des niveaux du subconscient, de sorte que nous n’avons pas besoin de consacrer une activité consciente à des tâches telles que le maintien postural ou la stabilité articulaire (Baechle et Earle, 2008).
On voit donc que ces processus font appel à la mémoire, à la perception et au retour proprioceptif afférent. Vous comprenez donc l’importance de la qualité des informations proprioceptives qui doivent être collectées et transmises au cerveau et au SNC pour maintenir, produire, réguler une posture ou une position articulaire (deux termes qu’il convient de bien distinguer ce que nous précisons plus loin) durant un mouvement et plus globalement la synergie entre les différents systèmes physiologiques sollicités. Cependant, une condition nécessaire mais pas toujours suffisante comme nous allons nous en rendre compte.

Cela nous amène à aborder la notion d’homéostasie, ce processus dynamique par lequel un organisme maintient et contrôle son environnement interne en dépit des perturbations externes (Riemann et al., 2002) : bien que cette régulation ne soit vraie que pour certaines fonctions physiologiques, nous nous permettons de l’employer ici. Car l’efficience d’un mouvement qui repose sur une contraction musculaire optimisée nécessite un support stable. Produire du mouvement est une chose. L’organiser, le contrôler, l’ajuster tout en maintenant une posture adaptée en est une autre. Le mouvement s’appuie sur le contrôle postural (Massion, 1992).
Des ajustements posturaux peuvent intervenir en amont de l’action motrice (ajustements anticipés), pendant l’action réalisée ou après la perturbation (réactions posturales) (Gahéry, 1987 : cf. Broussal-Derval et Delacourt, 2015). Cela, grâce à un un processus de stabilisation qui consiste à établir des contraintes musculaires actives – que la littérature identifie comme des réponses réflexes liées aux informations sensorielles perçues d’origine musculo-articulaires et vestibulaires – afin de minimiser le degré de liberté dans une articulation ou un ensemble d’articulations; et résulte dans la stabilisation d’une mobilité excessive lors de la manipulation d’éléments externes (Anderson et Behm, 2005). La proprioception faisant le lien entre la sensibilité posturale (statesthésie) et la sensibilité du mouvement (kinesthésie) (cf. partie précédente).
Au passage, notons la remarque de Jerome Simian (2017), préparateur physique (entre autre) du premier champion du monde français du Décathlon, Kevin Mayer, à propos du distinguo à faire entre posture et position : "La posture est une stratégie de gestion de la gravité. La position est l’arrangement des segments du corps permettant l’action efficiente à un moment donné du geste." Rappelant que "chaque étape du mouvement sportif est composée d’une position et d’une action/intention." En somme, la proprioception intervient dans la gestion de la gravité et de la position articulaire.
Ainsi, l’ensemble des informations proprioceptives – tactiles, musculaires et articulaires – que nous avons précédemment évoquées, associées aux informations vestibulaires et à la vision, permettent l’homéostasie posturale (figure 2) : contrôle de la musculature axiale et proximale par les voies extra-pyramidales; et segmentaire : contrôle de la musculature distale des membres par les voies cortico-spinales. Assurant ainsi le maintien de la station érigée (debout) en statique comme en dynamique (cf. vidéo). En effet, c’est grâce à l’activité tonique des muscles (tonus musculaire) s’opposant à la gravité (muscles antigravitaires) et entretenue par le réflexe myotatique (abordé en fin de partie), que cette verticalisation ou réponse axiale liée à notre bipédie, peut être maintenue.
Cette régulation s’effectue selon le modèle du pendule inversé où le pied et surtout le bassin (Assaiante et al., 2005) occupent une position privilégiée : elle implique des changements perpétuels des consignes neuromusculaires et de là, des oscillations permanentes du COM (centre de masse ou centre de gravité). Un modèle qui semble-t-il, ne serait plus adapté en cas de perturbations importantes durant lesquelles la tête doit rester stable pour assurer les prises d’informations (Collet, 2001) : la vision jouant un rôle encore plus déterminant dans les situations où l’équilibre est difficile et en particulier dans certaines activités sportives (Barsi, 2012). Ce qui nous amène aujourd’hui à reconsidérer la conception classique du contrôle postural selon laquelle l’homme debout est en équilibre lorsque la projection de son COM correspond à la verticale du centre de pression (polygone de sustentation). Alors qu’il est essentiel d’identifier le déplacement, la vitesse et l’accélération du COM pour caractériser chaque état. Et finalement admettre que l’homme debout n’est jamais en équilibre stable (cf. mon dossier sur le mal de dos et les lombalgies) et tout ce que cela implique dans l'approche que nous devons avoir de la proprioception.
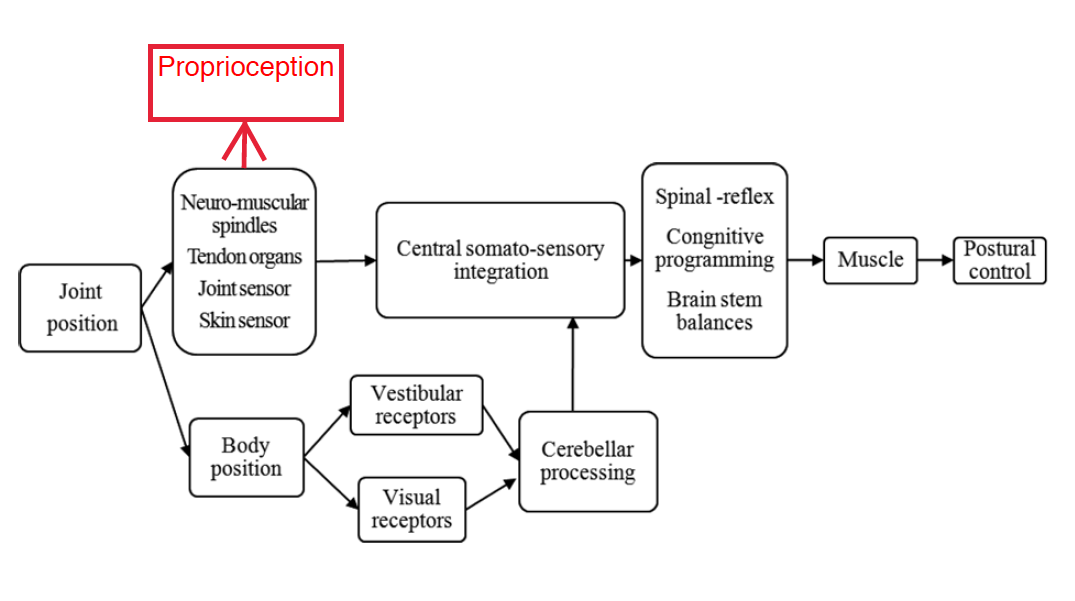
Figure 2 – Système de contrôle postural (Wang et al., 2016).
Puisqu'en parfait exemple, ce qui semble décidément ne pas être du fait du hasard, la proprioception (comme nous l’abordions plus haut), s’exprime au travers la motricité statique et dynamique, à la fois réflexe, automatique et volontaire. En effet, ce que soulignent une nouvelle fois Gasq et al. : "Le système proprioceptif permet d’apporter la plupart des solutions aux problématiques liées au mouvement, car il permet un codage permanent en trois dimensions autour de chaque articulation. Il s’agit du premier maillon du contrôle moteur, dans le sens où les informations proprioceptives existant pour chaque action, conditionnent en grande partie (!) ce contrôle, qu’il soit réactionnel (rétrocontrôle ou 'feedback' d’origine périphérique) ou anticipatoire ('feedforward control' d’origine centrale : action prédictive)".
De surcroit, comme le signifie Barsi (2012), « la proprioception et la vision sont deux systèmes de précision. Le plus rapide est le système proprioceptif, le plus fin étant le visuel ». Précisant : « Le système vestibulaire est le plus tardif à réagir, il est celui qui le fait avec le plus de violence et se limite aux situations d’urgence ». De là, on retiendra que sans informations proprioceptives, il ne peut y avoir de contrôle moteur.
Le contrôle moteur au sens large désigne l’ensemble des processus nerveux et musculaires permettant la réalisation d’une activité motrice. Il évoque ainsi l’orchestration du mouvement déterminé par la relation suivante selon Ferec (2015):
Informations proprioceptives + contrôle musculaire + intentions = contrôle moteur
Ici, le contrôle musculaire n’est autre que l’extension de la proprioception, étant tous deux des pré-requis au contrôle moteur. Et il est important de ne pas les confondre comme le fait remarquer Ferec s’appuyant sur une proposition de définition et la nuance avec le contrôle musculaire soumises par Delignières (2004) : "Il convient enfin de bien distinguer deux thématiques de recherches, parfois confondues dans les esprits : d’une part le contrôle moteur, et d’autre part l’apprentissage moteur. Les théories du contrôle moteur tentent de rendre compte de la manière dont les sujets produisent des comportements moteurs adaptés aux contraintes de tâches spécifiées. On se situe ici dans une problématique de production. Les théories de l’apprentissage visent à comprendre comment un sujet s’adapte à une tâche inédite, par l’adoption d’un comportement nouveau. On se situe alors dans une problématique d’acquisition. D’une manière générale, les théories du contrôle moteur s’intéressent à la gestion des habiletés sur-apprises, c’est-à-dire à la motricité de l’expert. A l’inverse les théories de l’apprentissage portent sur la construction de l’habileté". Ferec se permettant de préciser : "Le contrôle moteur touche plus au domaine des neurosciences qui le définissent comme la capacité de faire des ajustements posturaux dynamiques et de diriger le corps et les membres dans le but de produire un mouvement déterminé dans une situation donnée à un instant T".
De la sorte, pour produire une réponse musculaire appropriée, le SNC combine en général trois niveaux de contrôle moteur : le premier niveau émane du réflexe spinal qui utilise les afférences proprioceptives; le second est relatif au tronc cérébral qui coordonne les informations visuelles et vestibulaires en utilisant également la proprioception des récepteurs articulaires; le troisième rattaché au plus haut niveau du SNC (cortex moteur, ganglions de la base et cerebellum ou cervelet) est basé sur le programme cognitif qui accumule l’expérience par la répétition de mouvements et qui permet les ajustements volontaires (Dupeyron, 2012). Les aspects périphériques du contrôle moteur correspondant à la stabilisation articulaire, et nécessitant pour qu’il soit optimal, une information permanente et précise sur l’état de l’environnement extérieur et sur l’état interne du sujet.
Puisqu’il faut comprendre qu’un programme moteur n’est pas exécuté de façon rigide, il est flexible et s’adapte aux conditions externes et internes grâce à des procédés de rétroaction. C’est donc au niveau du tronc cérébral que sont intégrées les nombreuses informations sensorielles (visuelles, vestibulaires et proprioceptives) déterminantes pour la régulation de la motricité. Comme l’indique Berthoz, les capteurs de la proprioception (qui reste un système de précision avec la vision), ne mesurent que les mouvements relatifs des masses corporelles entre elles et ne suffisent pas pour les mouvements complexes (réalisés à haute intensité) – locomotion, course, saut – où le cerveau (notre anticipateur biologique) doit connaître les mouvements absolus de la tête et du corps dans l’espace (cf. paragraphe sur la régulation posturale) : c’est le rôle des capteurs (inertiels) vestibulaires. Pour autant, les récepteurs proprioceptifs sont primordiaux pour la stabilité, la coordination inter et intra-musculaire (définit comme l’interaction coopérative entre le système nerveux et les muscles squelettiques) et ses mécanismes de rétroaction essentiels à la réalisation d’une tâche donnée (Ergen et al., 2008). Et également pour l’intégrité des articulations notamment en fin d’amplitude. Tout dérèglement de la proprioception entraîne tôt ou tard des lésions musculaires, articulaires voire osseuses (Gillot et Peltier, 2004), qui en retour vont perturber ces mécanismes proprioceptifs, tel un cercle vicieux.
Comme vu précédemment et vous le savez, le maintien d’une stabilité articulaire dynamique (figure 3) implique de manière complémentaire des structures passives – ligaments, capsule articulaire, cartilage, géométrie osseuse – et des structures actives représentées par les muscles. Auxquelles s’ajoute le caractère viscoélastique (déformable) de chaque articulation. L’évaluation de ces différentes structures et des instabilités en vue de prédire un risque de blessure(s), passe respectivement par une quantification de la laxité articulaire (approche clinique) et par une appréciation du contrôle musculaire, véritable indicateur de la qualité proprioceptive, via par exemple, les techniques de testing manuel (Hislop et al., 2015). Il semblerait que le traitement des informations par les récepteurs de chacune de ces structures actives ou passives, et au vu de leurs caractéristiques décrites au préalable de cette partie – notamment au niveau du rachis – soit fonction de l’amplitude et de la position des membres par rapport au tronc : les récepteurs musculaires (FNM) traiteraient prioritairement les informations provenant de mouvements proximaux de faible amplitude tandis que les récepteurs articulaires (organes tendineux de Golgi, corpuscules de Ruffini et de Pacini), plutôt les informations induites par des mouvements distaux de grande amplitude (Holm et al., 2002). Et l’intensité dans tout cela ?
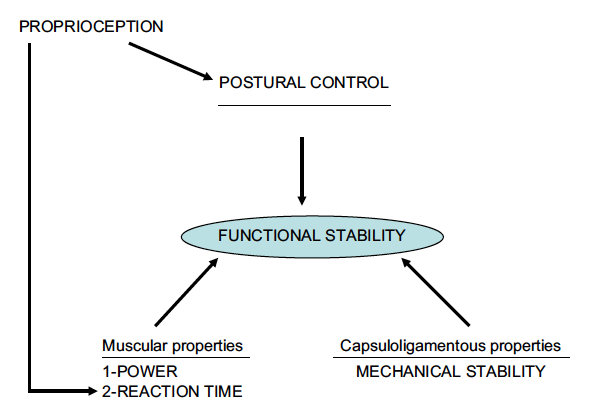
Figure 3 – Facteurs influençant la stabilité articulaire fonctionnelle (Ergen et Ulkar, 2008).
Les activités quotidiennes imposent des niveaux variables de défi (ou contraintes) au système neuromusculaire pour protéger le système squelettique, ses articulations et leurs ligaments contre les blessures. […] Ainsi, la proprioception est utile pour prévenir les blessures dans des tâches lentes, modérément rapides et même rapides. Cependant, le système neuromusculaire est parfois confronté à des sollicitations considérables, en particulier lors des réceptions sur des surfaces dures voire irrégulières inhérentes à de nombreuses pratiques sportives. La survenue des pics de force d’impact appliqués aux régions distales des membres, (notamment lors du contact du pied avec le sol : 'force de réaction au sol' dont le pic survient autour de 50 ms) laissent peu de temps au système neuromusculaire pour compléter la réponse motrice dans ce que les auteurs appellent 'le temps de réponse disponible'. […] Biomécaniquement, cela peut placer un ligament ou un tendon en situation précaire, car plus le niveau de tension du ligament augmente, plus il se rigidifie, et plus son seuil de tolérance diminue augmentant les risques d’une lésion consécutive à une tension supplémentaire. Et quelquefois, le système neuromusculaire n’a plus le temps de développer des forces de contraction musculaire pour limiter les déplacements articulaires et les tensions ligamentaires, pouvant ainsi devenir nuisibles. Preuve en est, le fait que les entorses se produisent montre que la contrainte externe a dépassé la capacité du système neuromusculaire à protéger son articulation (voir également les recherches de Thonnard mentionnées dans la seconde partie), mettant en lumière le fait que la conduction nerveuse et les latences de décision précisées plus haut peuvent empêcher une réponse motrice (Ashton-Miller, 2001).
Ajouté à cela, un dysfonctionnement d’une structure musculo-articulaire oblige le système sensori-moteur à un ajustement de la composante antagoniste et/ou synergique pour compenser la perte de l’action mécanique et des informations proprioceptives de la composante agoniste déficiente ou pathogène. Une résultante pouvant, en cas de diminution ou de perte de certaines fonctions stabilisatrices passives, expliquer l’origine des "tensions musculaires comme un mécanisme de protection permettant de suspendre le recrutement des zones faibles et sans communication disponible" (PRO-FTS). Et tout ce que cela implique en terme de compensations et de restrictions de mobilité. Ces dernières seraient la conséquence d’une faiblesse musculaire et non d’une tension musculaire de l’antagoniste : quid des étirements ? La finalité de ces adaptations étant d’optimiser l’efficience musculaire volontaire par la coactivation musculaire. Mais finalement, quel(s) rôle(s) attribuer aux mécanismes réflexes ?
L’accroissement de la raideur musculaire, qui constitue un des nombreux mécanismes de régulation, implique une accentuation de la raideur articulaire. Cet ajustement ayant pour but d’optimiser la stabilité dynamique de l’articulation face aux contraintes externes pour parvenir à l’efficacité musculaire. Elle est induite par une augmentation du niveau d’activation neuromusculaire qui s’exprime notamment par une plus grande sensibilité des FNM liée à une facilitation de la boucle gamma : boucle dite courte au travers de laquelle le cerveau régule le tonus musculaire. Cela se traduisant entre autre par une réduction de la durée de transmission d’une variation de longueur au fuseau neuromusculaire et de là, du temps d’initiation du réflexe myotatique (vidéo ci-dessous) initié par les fréquences des décharges que le FNM émet à la moëlle épinière. Provoquant ainsi l’activité du muscle agoniste grâce à des relais neuronaux.
En outre, cette contraction musculaire réflexe du muscle en réponse à son propre étirement est un mécanisme de protection (et de survie) lui permettant de résister à la traction s’exerçant sur le membre. Ce processus permet ainsi d'ajuster le tonus musculaire en fonction des stimulations et d’assurer l’intégrité musculo-articulaire de la ou des structure(s) sollicitée(s). En effet, comme la vitesse d’allongement croît plus vite que la longueur, la décharge du fuseau doit être maximale avant que la longueur du muscle étiré ne le soit, et l’intensité de la réponse réflexe proportionnelle à l’intensité de la stimulation. Seulement, comme nous le révélions ci-avant, ce qui semble se justifier pour des mouvements réalisés de manière lentes, modérément rapides voire rapides, montre toutes ses limites lors de tâches extrêmes qui dépassent les capacités du système neuromusculaire. Et si l'on reprend la classification de Wang (2016), les récepteurs dit lents à l'image des organes tendineux de Golgi pour lesquels les caractéristiques ne seraient adaptées qu'aux tâches de la vie quotidienne, et toutes les questions qui découlent du réflexe myotatique inverse (vidéo) et du réflexe d’inhibition autogénique (régulation réflexe du muscle antagoniste) et plus encore des fuseaux neuromusculaires à l'origine du réflexe myotatique lui-même soumis au réflexe d'inhibition réciproque (pensez bien que les propriocepteurs interdépendants les uns aux autres fonctionnent en synergie et qu'il est donc question de régulation(s): il n'y a pas un muscle qui est activé pendant que l'autre est inhibé et inversement...), ne seraient donc pas toujours en mesure de jouer leur(s) rôle(s) régulateur et protecteur. Dès lors, quel(s) autre(s) mécanisme(s) peut ou peuvent intervenir ?
Il faut comprendre que ce circuit réflexe (myotatique) particulièrement développé au niveau des muscles antigravitaires (voir partie Homéostasie posturale, segmentaire et proprioception) et dont le délai de réponse reste limité lors des mouvements volontaires de haute intensité, interviendrait dans ce cas comme relais de la coactivation musculaire (contraction simultanée des muscles agonistes et antagonistes autour d'une articulation) désignée sous le terme de "preflex control" (Bosch, 2015; Van Hooren, 2016). Ceci permettrait un contrôle musculo-articulaire plus rapide.
En effet, la fonction des cocontractions qui peut être assimilée à l'action des amortisseurs d'une voiture [lors d'une action comme un sprint par exemple], a un temps de réponse de zéro millisecondes et peut compenser les latences des rétroactions proprioceptives [contrôle réactionnel] (figure 4), initiées au préalable de l'action engagée. La partie afférente du SNC, dans cette situation, ne joue dès lors aucun (?) rôle dans ce contrôle [anticipatoire] puisque le mouvement est régulé par un feedforward efférent (commande en boucle ouverte) (Bosch, 2015). Nous n'iront pas jusqu'à conforter le fait que le rôle des rétroactions proprioceptives dans ce type de tâche est nul, mais un temps de réponse trop élevé ne ferait qu'amoindrir leur efficacité d'action. Ainsi, l'efficience d'un geste sportif, caractérisée par un cycle étirement-raccourcissement et un temps de contact (avec le sol) brefs et optimisés - dans le but de restreindre les contraintes générées (terrain favorable à l'apparition de traumatismes) - dépend principalement de la coactivation musculaire. Les qualités proprioceptives (et les réflexes), de par la latence de leurs mises en action, jouant le rôle d'amortisseurs de secours de notre voiture lancée à pleine vitesse. Ils n'interviendraient donc que de manière complémentaire lors des tâches réalisées à haute intensité, sous réserve de l'efficacité et de l'adaptation pour chaque situation, des propriocepteurs comme de leur système. En définitive, dans une démarche de performance et de "prévention" des blessures, deux axes majeurs se confirment pour la prise en charge et l'entraînement du sportif : optimiser l'ensemble des synergies musculaires fondamentales à la performance et réduire les temps de latence proprioceptifs. Comment et quelle(s) stratégie(s) adopter ? C'est l'objet de la seconde partie que vous pouvez consulter en cliquant ici.
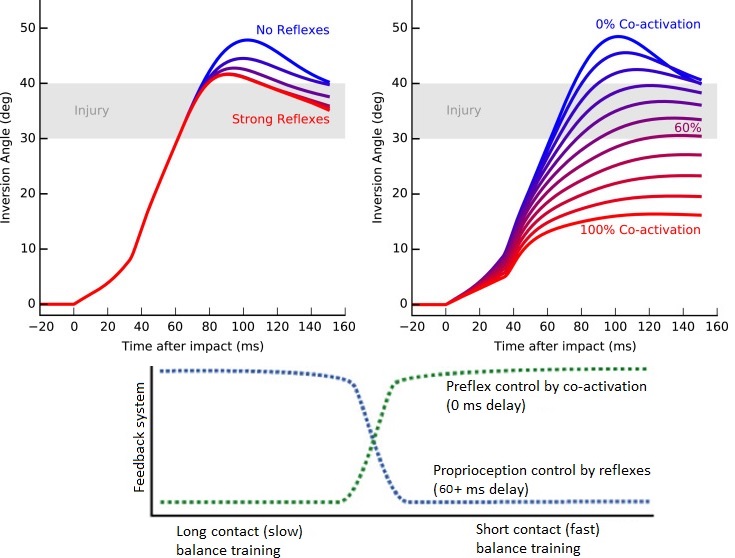
Figure 4 – Représentation graphique d'une phase de transition dans la stabilité de la jambe d'appui (Frans Bosch, 2015) / Contrôle préflexe par coactivation et contrôle de la proprioception (Van Hooren, 2016).
Pour conclure sur les mouvements réflexes, dont on a pas fini d'en comprendre les processus, notons qu'au vu de leur importance pour la protection de notre organisme et leur participation à sa stabilité dans nos tâches quotidiennes; bien qu’ils ne soient pas toujours suffisants lors de situations dynamiques plus extrêmes, il convient de retenir que ces mécanismes à l’image des réflexes myotatique et myotatique inverse, sont constitués de mouvements involontaires non contrôlés par le SNC et le cerveau. Conférant au système postural, son auto-régulation et son autonomie dans la gestion de la gravité. En conséquence, les mécanorécepteurs proprioceptifs – ici mentionnés les FNM et les organes tendineux de Golgi – ne sont donc pas des éléments passifs. Etait-il nécessaire de le rappeler ?
Si vous souhaitez approfondir l’approche neuroanatomique fonctionnelle et tout ce que nous n’explorons pas dans ce dossier, notamment la modulation des informations afférentes (proprioceptives) (figure 5), je vous renvoie aux références concernées.
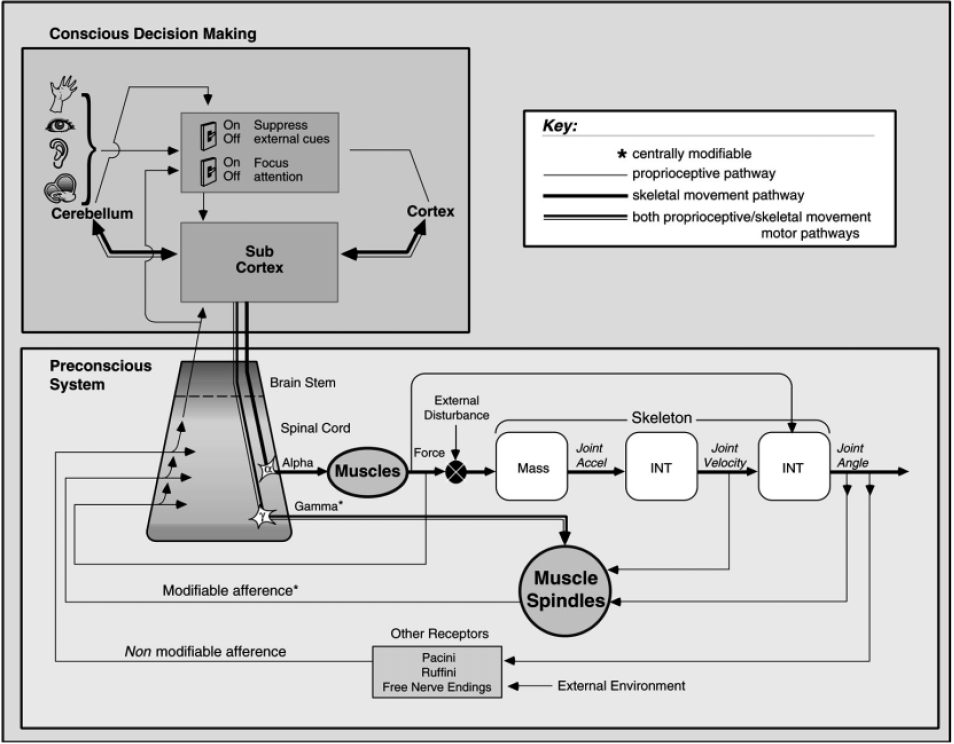
Figure 5 – Schématisation des voies principales et des fonctions pouvant être impliquées dans la proprioception (Ashton-Miller et al., 2001).
Au travers cette première partie, nous avons pu constater que le système informatif (et de précision) que constitue la proprioception est fondamental au contrôle musculaire et par conséquent, au contrôle moteur. L’ensemble des informations qu’elle représente, de par la stabilité globale comme segmentaire qu’elle conditionne, sont le socle d’une motricité qui se doit d’être "efficiente, efficace et ajustable" (Bosch F., 2015). De fait, au travers la motricité volontaire, automatique, réflexe et le système postural au sein desquels elle s’exprime, la proprioception est un facteur déterminant pour l’optimisation de la performance tout autant qu’elle l’est pour la gestion des blessures, bien qu'à elle seule, elle ne soit pas toujours suffisante. La stabilité étant, de loin, prédominante pour l’accomplissement de ces deux vocations. Se pose dès lors la question portant sur l’entraînabilité des aspects proprioceptifs. Puisqu’une des problématiques actuelles concerne le paradigme mécanique stabilité/mobilité, alimenté entre autre par la place prépondérante accordée aux situations sur surfaces instables en vue d’optimiser la proprioception.
Cette approche est-elle réellement fondée ?

 Olivier Allain
Olivier AllainOlivier Allain est préparateur physique spécialisé dans le rugby et dans la réathlétisation. Il intervient également auprès de sportifs amateurs et de particuliers. Retrouvez-le sur son site, sa page Facebook pro, et sa chaîne YouTube.
Nous vous rappelons que vous pouvez citer les articles sous réserve de limiter votre citation à 200 mots maximum et d'inclure un lien nominatif vers celui-ci. Tout autre utilisation, en particulier la copie en totalité sur un forum de discussions, sur un site internet ou tout autre contenu, est strictement interdite.
Copyright © 2011-2024 - www.sci-sport.com - Tous droits réservés







 Facebook
Facebook Instagram
Instagram Twitter
Twitter Flux RSS
Flux RSS Newsletter
Newsletter YouTube
YouTube